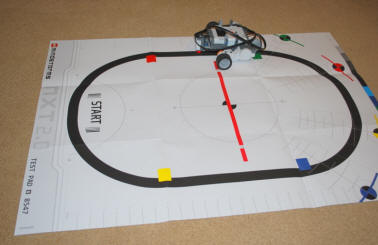
Этот робот будет следовать по линии на полу с помощью датчика цвета NXT 2.0. В конце публикации Вы можете загрузить две программы. Одна из них представялет собой простой вариант. Назовём её программа «двух состояний». Она приводит зигзагообразные движения, что смотрится, конечно, страшновато. И более сложную программу «Пропорциональное движение» — это более плавное и быстрое следование по линии.
Попробуйте Линейного ползуна на листе испытаний NXT.
Создай свою собственную линию, используя ленту на полу.
Сборрочная инструкция
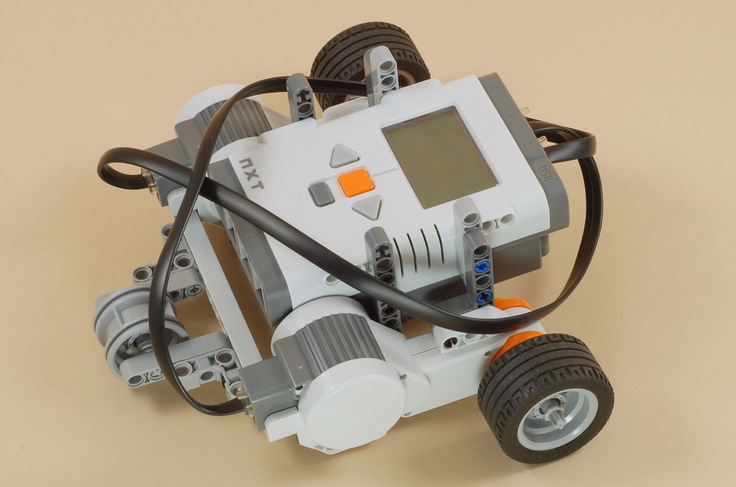
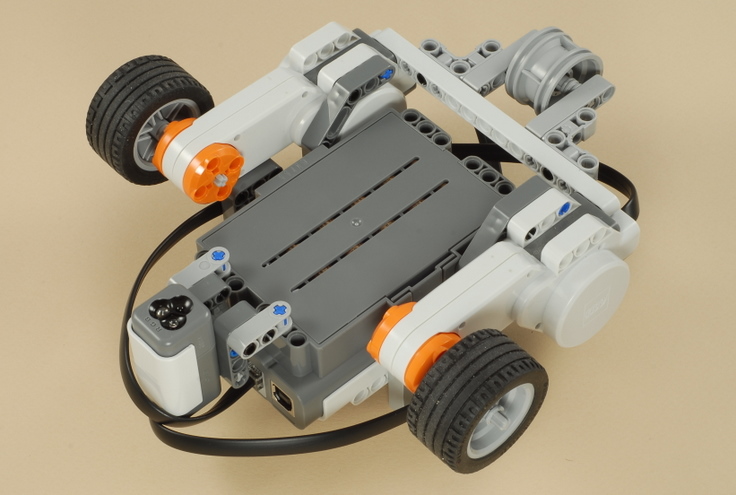
Сначала Вам необходимо собрать «Робота пятиминутку». Нажмите на картинку для перехода к инструкции его создания.
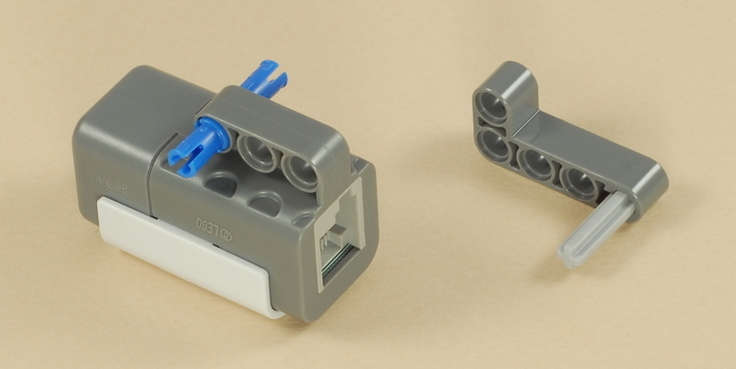
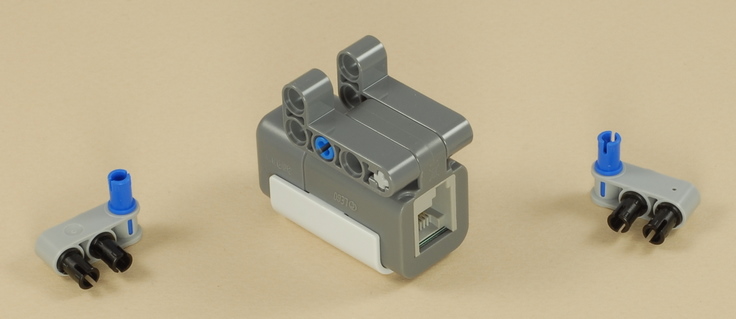
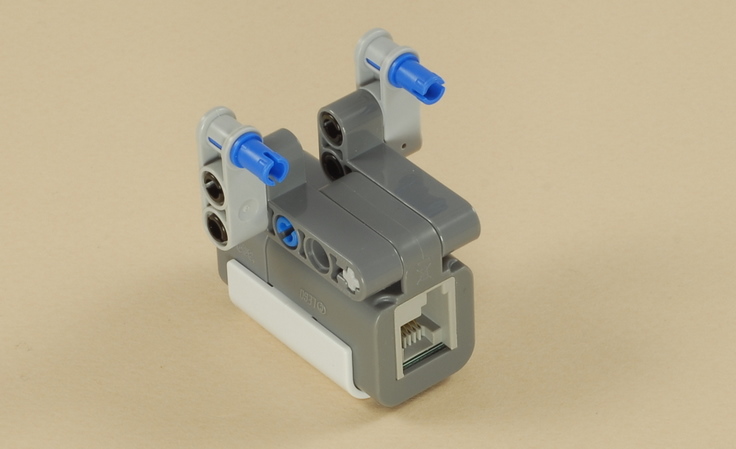
Присоедините цветовой датчик к порту № 3 NXT контроллера.
Программирование «Линейного ползуна»
Скачайте программу двух состояний — программа 1 и программу пропорционального движения — программа 2
Эти две программы, предназначенные для «Линейного ползуна». Обе программы используют цветовой датчик в режиме «Light Sensor». В этом режиме горит только красная светодиодная лампа датчика. Датчик измеряет количество света, который отражается обратно в датчик, получая в итоге значение от 0 до 100.
Конечно, можно использовать цветовой датчик в полноцветном режиме, но мы выяснили что для решения именно этой задачи одного цвета достаточно.
Программа № 1 «два состояния» — простая и позволяет роботу перемещаться по линии, но требует специальную калибровку датчика. Робот постоянно «подруливает» то влево, то вправо в зигзагообразном стиле. Запомните, что робота нужно запускать возле правого края линии!
Перед тем как использовать эту программу, рекомендуем сначала откалибровать значение яркости для использования в качестве «отсечки» между двумя состояниями (светлый и темный). Для этого вы можете использовать програмамму «Светометр». Порядок измерения: с помощью программы измеряете яркость по центру линии (темный цвет), на полу (яркий цвет), и выбираете среднее из них значение. Это и будет назваться отсечкой. Например, если программа показывает 20 единиц на линии и 40 единиц на полу, то в качестве порогового значения (отсечики) нужно выбрать 30 единиц.
Программа № 2 «пропорциональное движение» — более сложная. Она непрерывно регулирует мощность двигателей робота в зависимости от того, насколько далеко находится линия. Если робот находится немного от края линии, то используется небольшая мощность двигателей. Когда робот находится точно над правым краем линии, он будет двигаться прямо вперед на полной мощности. Это позволяет ему двигаться плавнее и быстрее, чем при работе программы «два состояния».
Кроме того, программа «пропорциональное движение» делает автоматическую «калибровка» в начале, когда робот сканирует линии и поверхность, чтобы определить самый темный и самый яркий участок, так что нет необходимости вручную определять пороговые значения. Для получения правильной калибровки, поставьте робота с датчиком непосредственно по середине линии.
Возможные эксперименты
Обязательно попробуйте другие трассы, создав собственную. Трассу можно создавать из обычной изоленты чёрно цвета, потому что это она чёрная и гибкая, а также не оставляет следов на полу при отрывании от пола. При создании трассы, обязательно, сделайте несколько прямых участков, резких поворотов. Проведите эксперименты и выясните на какой трассе робот ведёт себя лучше всего, вылетает ли он с трассы? И при каких условях? Поэкспериментируйте также с настройкой уровня мощности двигателей, выбирете такие значения в программе, при которых робот не вылетает из трассы и всегда проходит её без проблем.
Источник
Шаг 6. Управление роботом
Способы управления роботом
Управление роботом является сложной задачей. Определение, которое мы выбрали для «робота», требует, чтобы устройство получало данные о своей среде. Затем принимало решение и предпринимало соответствующие действия. Роботы могут быть автономными и полуавтономными.
Управление подводным роботом
Автономный робот работает по заданному алгоритму исходя из поступающих от датчиков данных.
У полуавтономного робота есть задачи, которые контролируются человеком. И дополнительно есть другие задачи, которые он выполняет сам по себе.
Полуавтономные роботы
Хорошим примером полуавтономного робота является сложный подводный робот. Человек контролирует основные движения робота. И в это время бортовой процессор измеряет и реагирует на подводные токи. Это позволяет держать робота в одном и том же положении без дрейфа. Камера на борту робота отправляет видео обратно человеку. Дополнительно бортовые датчики могут отслеживать температуру воды, давление и многое другое.
Если робот теряет связь с поверхностью, то включается автономная программа и поднимает подводного робота на поверхность. Для того, чтобы иметь возможность управлять своим роботом, нужно будет определить его уровень автономности. Возможно вы хотите чтобы управление роботом осуществлялось по кабелю, было беспроводное или полностью автономное.
Управление по кабелю
Самый простой способ управления роботом — это ручной контроллер, физически подключенный к нему с помощью кабеля. Переключатели, ручки, рычаги, джойстики и кнопки на этом контроллере позволяют пользователю управлять роботом без необходимости включать сложную электронику.
В этой ситуации двигатели и источник питания могут быть подключены непосредственно к переключателю. Следовательно, можно контролировать его вращение вперед / назад. Это используется обычно в транспортных средствах.
Полуавтономный подводный робот
Они не имеют интеллекта и считаются скорее «дистанционно управляемыми машинами», чем «роботами».
Основными преимуществами такого подключения является то, что робот не ограничивается временем работы. Так как он может быть подключен непосредственно к сети. Не нужно беспокоиться о потере сигнала. Робот, как правило, имеет минимум электроники и не очень сложный. Сам робот может быть легким или иметь дополнительную полезную нагрузку. Робота можно извлечь физически при помощи троса, прикрепленного к кабелю, если что-то пойдет не та. Это особенно актуально для подводных роботов.
Основными недостатками является то, что трос может запутаться, зацепиться за что-то, или оборваться. Расстояние, на которое можно отправить робота, ограничено длиной троса. Перетаскивание длинного троса добавляет трение и может замедлить или даже остановить движение робота.
Управление роботом при помощи кабеля и встроенного микроконтроллера
Следующим шагом будет установка микроконтроллера на робота, но при этом продолжать использовать кабель. Подключение микроконтроллера к одному из портов ввода / вывода вашего компьютера (например, USB-порт) позволяет вам управлять своими действиями. Управление происходит с помощью клавиатуры, джойстика или другого периферийного устройства. Добавление микроконтроллера в проект также может потребовать, чтобы вы запрограммировали робота на входные сигналы.
робот с управлением по кабелю и микроконтроллером
Основные преимущества такие же, как и при непосредственном управлении по кабелю. Может быть запрограммировано более сложное поведение робота и его реакция на отдельные кнопки или команды. Имеется большой выбор управления контроллером (мышь, клавиатура, джойстик и т. д.). Добавленный микроконтроллер имеет встроенные алгоритмы. Это означает, что он может взаимодействовать с датчиками и принимать определенные решения самостоятельно.
К недостаткам относится более высокая стоимость из-за наличия дополнительной электроники. Другие недостатки такие же как и при непосредственном управлении роботом по кабелю.
Управление по Ethernet
Используется разъёмEthernet RJ45. Для управления нужно Ethernet соединение. Робот физически подключен к маршрутизатору. Следовательно его можно контролировать через Интернет. Также это возможно (хотя и не очень практично) для мобильных роботов.
Настройка робота, который может общаться через Интернет, может быть довольно сложной. В первую очередь предпочтительным является соединение WiFi (беспроводной интернет). Проводная и беспроводная комбинация также являются опцией, где есть приемопередатчик (передача и прием). Приемопередатчик физически подключен к Интернету, и данные, полученные через Интернет, затем передаются беспроводным способом роботу.
управление роботом по ethernet
Преимуществами является то, что робота можно контролировать через интернет из любой точки мира. Робот не ограничен по времени работы, так как он может использовать Power over Ethernet. PoE. Это технология, которая позволяет передавать удалённому устройству электрическую энергию вместе с данными через стандартную витую пару по сети Ethernet. Использование интернет-протокола (IP) может упростить и улучшить схему связи. Преимущества те же, что и при прямом проводном компьютерном управлении.
Недостатком является более сложное программирование и те же недостатки, что и при управлении по кабелю.
Управление при помощи ИК-пульта
Инфракрасные передатчики и приемники исключают кабель, соединяющий робота с оператором. Это, как правило, используется начинающими. Для работы инфракрасного управления требуется «линия визирования». Приемник должен иметь возможность «видеть» передатчик в любое время, чтобы получать данные.
Инфракрасные пульты дистанционного управления (такие, как универсальные пульты дистанционного управления, для телевизоров), используются для отправки команд инфракрасному приемнику, подключенному к микроконтроллеру. Он затем интерпретирует эти сигналы и контролирует действия робота.
Радиоуправление
Для управления при помощи радиочастот требуется передатчик и приемник с небольшими микроконтроллерами для отправки, приема и интерпретации данных, передаваемых по радиочастоте (RF). В коробке приемника имеется печатная плата (печатная плата), которая содержит приемный блок и небольшой контроллер сервомотора. Для радиосвязи требуется передатчик, согласованный / сопряженный с приемником. Возможно использование трансивера, который может отправлять и принимать данные между двумя физически разными средами систем связи.
Радиоуправление не требует прямой видимости и может быть осуществлено на большом расстоянии. Стандартные радиочастотные устройства могут обеспечивать передачу данных между устройствами на расстоянии до нескольких километров. В то время как более профессиональные радиочастотные устройства могут обеспечивать управление роботом практически на любом расстоянии.
пульт радиоуправления роботом
Многие конструкторы роботов предпочитают изготавливать полуавтономных роботов с радиоуправлением. Это позволяет роботу быть максимально автономным, обеспечивать обратную связь с пользователем. И может давать пользователю некоторый контроль над некоторыми его функциями в случае необходимости.
Преимуществами является возможность управлять роботом на значительных расстояниях, может просто настраиваться. Связь является всенаправленной, но может не проходить сигнал полной блокировке стенами или препятствиями.
Недостатками является очень низкая скорость передачи данных (только простые команды). Дополнительно нужно обращать внимание на частоты.
Управление по Bluetooth
Bluetooth является радиосигналом (RF) и передается по определенным протоколам для отправки и получения данных. Обычный диапазон Bluetooth часто ограничен примерно 10 м. Хотя он имеет то преимущество, что позволяет пользователям управлять своим роботом через устройства с поддержкой Bluetooth. Это в первую очередь сотовые телефоны, КПК и ноутбуки (хотя для создания интерфейса может потребоваться настраиваемое программирование). Так же, как и радиоуправление, Bluetooth предлагает двустороннюю связь.
управление роботом по блютуз
Преимущества: управляемый с любого устройства с поддержкой Bluetooth. Но, как правило, требуется дополнительное программирование. Это смартфоны, ноутбуки и т.д. Более высокие скорости передачи данных могут быть всенаправленными. Следовательно, не нужна прямая видимость и сигнал может немного проходить через стены.
Недостатки. Должен работать в паре. Расстояние обычно составляет около 10 м (без препятствий).
Управление по WiFi
Управление по WiFi часто является дополнительной опцией для роботов. Способность управлять роботом по беспроводной сети через Интернет представляет некоторые существенные преимущества (и некоторые недостатки) для беспроводного управления. Чтобы настроить управление роботом по Wi-Fi нужен беспроводной маршрутизатор, подключенный к Интернету, и блок WiFi на самом роботе. Для робота можно использовать устройство, которое поддерживает TCP / IP протокол.
управление по WI-FI
Преимуществом является возможность управлять роботом из любой точки мира. Для этого нужно чтобы он находился в пределах диапазона беспроводного маршрутизатора. Возможна высокая скорость передачи данных.
Недостатки то, что необходимо программирование. Максимальное расстояние обычно определяется выбором беспроводного маршрутизатора.
Управление при помощи сотового телефона
Другая беспроводная технология, которая была первоначально разработана для связи человека и человека — сотовый телефон, теперь используется для управления роботами. Поскольку частоты сотового телефона регулируются, включение сотового модуля на робота обычно требует дополнительного программирования. Также не нужно понимания системы сотовой сети и правил.
управление по сотовому телефону
Преимущества: робота можно контролировать в любом месте, где есть сотовый сигнал. Возможна спутниковая связь.
Недостатки; настройка управления по сотовой связи могут быть сложными — не для начинающих. В каждой сотовой сети есть свои собственные требования и ограничения. Обслуживание в сети не является бесплатным. Обычно чем больше данных вы передаете, тем больше денег вам надо заплатить. Система пока еще не настроена для использования в робототехнике.
Автономное управление роботом
Следующим шагом будет использование микроконтроллера в вашем роботе в полном объеме. И в первую очередь программирование его алгоритма работы по вводу данных от его датчиков. Автономное управление может осуществляться в различных формах:
быть предварительно запрограммировано без обратной связи с окружающей средой
с ограниченной обратной связью с датчиками
со сложной обратной связью с датчиками
Настоящее автономное управление включает в себя множество датчиков и алгоритмов. Они позволяют роботу самостоятельно определять лучшее действие в любой заданной ситуации. Самые сложные методы управления, которые в настоящее время реализуются на автономных роботах, являются визуальными и слуховыми командами. Для визуального контроля робот смотрит на человека или объект, чтобы получить свои команды.
автономное управление роботом
Управление роботом для поворота налево при помощи чтения с листа бумаги стрелки, указывающей влево, намного сложнее выполнить, чем можно было бы представить. Служебная команда, такая как «повернуть налево», также требует довольно много программирования. Программирование множества сложных команд, таких как «Принесите мне тапочки» уже не фантазия. Хотя требует очень высокого уровня программирования и большого количества времени.
Преимущества – это ”настоящая» робототехника. Задачи могут быть очень простым, например, от мигания света, основанного на показаниях одного датчика. До посадки космического корабля на далекой планете.
Недостатки зависят только от программиста. Если робот делает что-то, чего вы не хотите чтобы он делал, то у вас есть единственный вариант. Это проверить свой код, изменить его и загрузить изменения в робота.
Автономная платформа
Целью нашего проекта является создание автономной платформы, способной принимать решение, основанное на внешних сигналах от датчиков.
управление микроконтроллером Lego EV3
Мы будем использовать микроконтроллер Lego EV3. Он нам позволяет сделать как полностью автономную платформу. Так и полуавтономную, управляемую по Bluetooth или при помощи инфракрасного пульта управления.




 Управление подводным роботом
Управление подводным роботом  Полуавтономный подводный робот
Полуавтономный подводный робот робот с управлением по кабелю и микроконтроллером
робот с управлением по кабелю и микроконтроллером  управление роботом по ethernet
управление роботом по ethernet  пульт радиоуправления роботом
пульт радиоуправления роботом управление роботом по блютуз
управление роботом по блютуз  управление по сотовому телефону
управление по сотовому телефону  управление микроконтроллером Lego EV3
управление микроконтроллером Lego EV3


