
- Способы задания положения тела в пространстве
- Каким способом можно задать положение тела
- Способы описания движения. Система отсчета
- Урок 3. Физика 10 класс
- В данный момент вы не можете посмотреть или раздать видеоурок ученикам
- Получите невероятные возможности
- Конспект урока «Способы описания движения. Система отсчета»
Способы задания положения тела в пространстве
1. Описание движения с помощью параметров траектории.
Пусть траектория движения известна. Тогда, зная зависимость пути, пройденного телом, от времени, можно определить его положение в любой момент.
2. Векторный способ описания движения.
Положение тела в пространстве можно задать также в виде радиуса-вектора r. В произвольный момент времени оно определяется зависимостью r(t) . Вектор перемещения s(t) рассчитывается как разность между величинами радиуса-вектора r(t) в различные моменты времени t .
3.Координатный способ описания движения.
Поскольку векторная величина может быть представлена как сумма ее проекций, то положение тела в пространстве в любой момент времени можно определить, исходя из зависимостей от времени проекций радиуса-вектора на оси координат x(t), y(t), z(t).
3. Кинематика материальной точки: Путь, перемещение, траектория. Скорость (средний вектор скорости, мгновенная скорость). Проекции вектора скорости на оси координат. Равномерное движение.
Радиус-вектор –вектор, проведенный из начала координат в данную точку.
Траектория –линия, вдоль которой движется частица.
Путь –длина траектории.
Вектор перемещения –отрезок, поведенный из начального положения тела в конечное.
Скорость –быстрота изменения положения точки в пространстве.
1) Средняя – величина, равная проеденному пути ко времени, в течение которого продолжалось движение.
2) Мгновенная – величина, равная производной от радиуса-вектора точки по времени.
υ = lim ∆r/∆t, при ∆t→0 или υ=r’
Равноме́рное движе́ние — механическое движение, при котором тело за любые равные отрезки времени проходит одинаковое расстояние
4. Прямолинейное равнопеременное движение, его характеристики и их взаимосвязь.
Равнопеременное движение, движение точки, при котором её касательное ускорение wt (в случае прямолинейного Р. д. всё ускорение w) постоянно. Скорость v, которую имеет точка через t сек после начала движения, и её расстояние s от начального положения, измеренное вдоль дуги траектории, определяются при Р. д. равенствами:
где v0 — начальная скорость точки. Когда знаки v и wt одинаковы, Р. д. является ускоренным, а когда разные — замедленным.
5. Движение материальной точки при движении по криволинейной траектории, тангенциальное, нормальное и полное ускорения.
При неравномерном движении скорость частицы может меняться как по величине, так и по направлению. Быстрота изменения скорости определяется ускорением, которое равно первой производной от скорости по времени или второй производной от пути по времени.
Ускорение –изменение скорости тела со временем.
a= lim ∆υ/∆t=dυ/dt= υ’ при ∆t→0
a=d/dt*(dr/dt)=d 2 r/dt 2 =dr/dt=r’’
Быстрота поворота вектора скорости пропорциональна модулю скорости и кривизны траектории.
с=lim ∆φ/∆S=∆φ/∆S, при ∆S→0 ,
∆φ – угол между кривой и касательной
R=1/С – радиус кривизны
Тангенциальное ускорение – изменение величины вектора скорости точки со временем.
Нормальное ускорение-изменение направления вектора скорости материальной точки со временем.
an=a-aτ=(υ 2 /R)*n, где n-вектор нормали, перпендикулярный вектору τ, т.е(n, τ)=0, τ-единичный вектор направленный параллельно вектору скорости
R- радиус кривизны, где определяется скорость движения или радиус окружности касательной в данной точке к искривленной траектории движения.
6. Прямая и обратная задача кинематики. Поступательное и вращательное движение твердого тела.
Абсолютно твердое тело —тело деформациями которого можно пренебречь в данной задаче.
Поступательное движение – движение при котором любая прямая, жестко связанная с телом остается при своём движение параллельно самой себе.
Следовательно, для описания поступательного движения твердого тела достаточно знать, как движется одна из его точек.
Вращательное движение – движение тела, при котором все его точки движутся по окружности, центры которых лежат на одной прямой, называемой осью вращения, а плоскости окружности перпендикулярны оси вращения.
7. Кинематические характеристики вращательного движения, связь между угловыми и линейными характеристиками движения материальной точки.
Угловая скорость –это вектор ω, численно равный первой производной от угла поворота по времени, и направленный вдоль оси вращения в направлении dφ (ω и dφ всегда направлены в одну сторону).
ω=lim ∆φ/∆t=dφ /dt при ∆t→0
Угловая скорость направлена вдоль оси вращения в сторону, определяемую правилом правого винта. Как и угол поворота ∆φ, она является псевдовектором
При неравномерном вращении вектор угловой скорости может менять как свою величину, так и свое направление за счет поворота оси вращения.
Угловое ускорение –это вектор ε, второй производной от угла поворота по времени.
ε=lim ∆ω/∆t=dω/dt при ∆t→0
Угловое ускорение тоже является пседовектором, его размерность. Если e >0, то вектор направлен в ту же сторону, куда направлен и вектор. Если e
Источник
Каким способом можно задать положение тела
Движение. Виды движений. Описание движения. Система отсчета.
Механическим движением тела (точки) называется изменение его положения в пространстве относительно других тел с течением времени.
А) Равномерное прямолинейное движение материальной точки.
Б) Равноускоренное прямолинейное движение материальной точки.
В) Движение тела по дуге окружности с постоянной по модулю скоростью.
Г) Гармоническое колебательное движение. Важным случаем механического движения являются колебания, при которых параметры движения точки (координаты, скорость, ускорение) повторяются через определенные промежутки времени.
1. Векторный способ описания движения
ОПРЕДЕЛЕНИЕ: Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки М в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r = r ( t ) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение s точки.

2. Координатный способ описания движения
ОПРЕДЕЛЕНИЕ: Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

В декартовой системе координат положение точки определяется тройкой чисел ( x , y , z ) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: x = x ( t ), y = y ( t ), z = z ( t )
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки: rx = x , ry = y , rz = z .
3. Естественный способ описания движения
ОПРЕДЕЛЕНИЕ: Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О 1 , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О 1 . При движении точка М переместится в точку М 1 , соответственно изменится ее расстояние от точки О 1 . Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s = s ( t ) .



Под системой отсчета понимают тело отсчета, которое условно считается неподвижным, систему координат, связанную с телом отсчета, и часы, также связанные с телом отсчета. В кинематике система отсчета выбирается в соответствии с конкретными условиями задачи описания движения тела.
Источник
Способы описания движения. Система отсчета
Урок 3. Физика 10 класс

В данный момент вы не можете посмотреть или раздать видеоурок ученикам
Чтобы получить доступ к этому и другим видеоурокам комплекта, вам нужно добавить его в личный кабинет, приобрев в каталоге.
Получите невероятные возможности

Конспект урока «Способы описания движения. Система отсчета»
Сегодня мы рассмотрим наиболее распространенные способы описания движения и более подробно остановимся на понятии системы отсчёта. Напомним, что для описания движения материальной точки нужно научиться рассчитывать положение точки в любой момент времени, относительно выбранного тела отсчета.
Например, если мы задаём положение точки в системе координат, то каждая координата будет зависеть от времени. То есть, чтобы описать движение точки нужно найти функцию зависимости каждой координаты от времени.
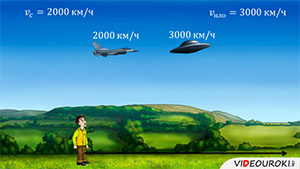
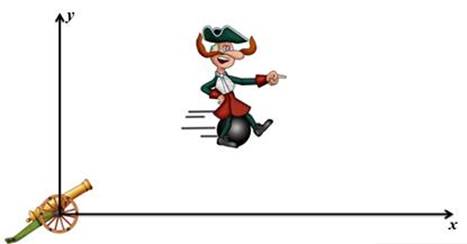
Для примера возьмем подвиг незабвенного барона Мюнхгаузена, который утверждал, что может летать на ядре. Если учесть большое расстояние, которое пролетает ядро, то Мюнхгаузена можно считать за точку. Пушка будет являться телом отсчёта, то есть, началом координат. Положение барона можно описать с помощью двух координат, поскольку он двигается только в одной плоскости.
Тогда, зависимости координат х и у будут описываться уравнениями:

Эти уравнения называются кинематическими уравнениями движения точки.
Линия, вдоль которой движется точка в пространстве, называется траекторией.
Движение может быть разным, и траектория может быть сколь угодно сложной. Движение называется прямолинейным, если траектория является прямой линией.
Если же траектория представляет собой кривую, то это движение криволинейное.
Другой способ описания движения — это векторный способ. На прошлом уроке мы познакомились с тем, как задавать положение точки с помощью радиус-вектора. Если точка двигается, то с течением времени, радиус вектор может изменять длину и направление. Таким образом, радиус-вектор являться функцией зависимости от времени:


Поскольку радиус-вектор определяется с помощью координат, то одно векторное уравнение эквивалентно трём скалярным уравнениям:

Как мы знаем, системой отсчёта называется совокупность тела отсчёта и связанной с ним системы координат и часов, с помощью которых измеряется время. В различных системах отсчёта движение одного и того же тела может быть описано по-разному. Например, если сбросить мяч с крыши дома, то в системе отсчёта, связанной с крышей, длина радиус-вектора будет увеличиваться. Но в системе отсчёта связанной с поверхностью Земли, длина радиус-вектора будет уменьшаться.
Главное запомнить следующее: если выбрали тело отсчета, то все наблюдения, вычисления и уравнения должны быть связаны именно с этим телом отсчёта, как с началом координат.
Например, в каюте корабля все предметы остаются неподвижны, относительно корабля. Но, вместе с этим, все эти предметы двигаются относительно поверхности земли.

Таким образом, в системе отсчета, связанной с кораблем, координаты тел, находящихся в каюте, будут заданы постоянными величинами. В системе отсчёта, связанной с поверхностью земли, координаты будут задаваться в соответствии со скоростью движения корабля. Если мы предположим, что корабль двигается равномерно и прямолинейно, то меняться будет только одна координата. Если же мы предположим, что корабль покачивается на волнах, то координата зет будет задана периодичной функцией.
Примеры решения задач.
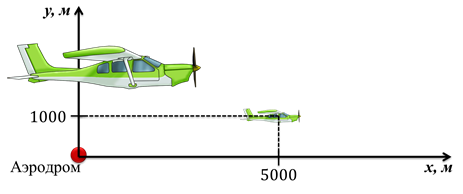
Задача 1. Самолёт летит в одной плоскости. В начальный момент времени самолёт находится на высоте 1000 м и на расстоянии 5 км от аэродрома. Постройте соответствующую систему координат и отметьте на ней самолёт в начальный момент времени.
Давайте выполним несколько упражнений. Допустим, самолёт летит в одной плоскости. В начальный момент времени самолет находится на высоте 1000 метров и на расстоянии 5 километров от аэродрома. Постройте соответствующую систему координат и отметьте на ней самолет в начальный момент времени.
Итак, очевидно, что телом отсчёта в данном случае является аэродром.
Задача 2. Если самолёт, двигаясь равномерно, ежеминутно поднимается на 1200 метров и удаляется от аэродрома на 3000 метров, то, как описать его движение?
Из формулировки этого вопроса мы можем извлечь следующее: в одинаковые промежутки времени, равные 1 мин, горизонтальное перемещение самолёта составляет 3000 метров, а вертикальное — 1200 метров.
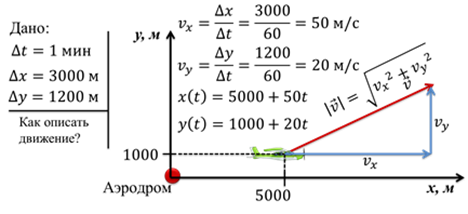
Обратите внимание, что реальная скорость самолёта направлена так, что самолёт одновременно удаляется от аэродрома и в горизонтальном, и в вертикальном направлении. Поэтому, скорости, которые мы нашли — это проекции вектора скорости на оси х и у.
Источник



