
Регулирование частоты вращения двигателей с параллельным возбуждением
 Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
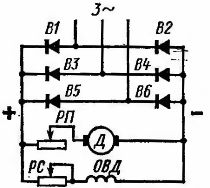
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Какие существуют способы регулирования скорости вращения якоря двигателя с параллельным возбуждением
Основным преимуществом электродвигателей с параллельным возбуждением является возможность широкого и плавного регулирования их скорости вращения.
Уравнения, выведенные в особенностях электродвигателей постоянного тока , показывают, что искусственная регулировка скорости вращения может производиться тремя способами: изменением сопротивления якорной цепи, изменением магнитного потока и изменением напряжения, подводимого к якорю.
Регулирование скорости вращения изменением сопротивления якорной цепи. Для регулирования скорости вращения электродвигателя в цепь якоря последовательно включают дополнительные сопротивления ( см. рис. 10 ). Уравнение (30) показывает, что каждому новому значению дополнительного сопротивления соответствует своя искусственная механическая характеристика. То же самое относится и к скоростным характеристикам. Анализ этого уравнения показывает, что между сопротивлением якорной цепи и скоростью вращения существует линейная зависимость, т. е. при любом значении R характеристики электродвигателя остаются прямолинейными и при холостом ходе проходят через точку п = п 0 . Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика электродвигателя (рис. 12). Это означает, что при одной и той же нагрузке скорость электродвигателя тем ниже, чем выше величина дополнительного сопротивления, включенного в якорную цепь. Уменьшение скорости объясняется дополнительным падением напряжения в добавочном сопротивлении.

Процесс перехода от одной скорости к другой происходит следующим образом. Допустим, электродвигатель, развивая момент М = М с , работает устойчиво на естественной характеристике а в точке 1 (контакты 1У, 2У и 3У на рис. 10 замкнуты). Если необходимо снизить скорость вращения электродвигателя, размыкают контакт 1У и тем самым в цепь якоря вводят дополнительное сопротивление R 1 . Согласно уравнению (30) электродвигатель должен перейти на характеристику b, соответствующую новому значению сопротивления якорной цепи. Электродвигатель обладает значительной инерцией и при переключении сопротивлений скорость его вращения мгновенно измениться не может. Поэтому в первый момент электродвигатель переходит на работу в соответствующей точке 2 на характеристике b. При этом ток якоря и вращающий момент уменьшаются, нарушается равновесие моментов (М c ) и скорость электродвигателя начинает снижаться до тех пор, пока снова не восстановится равновесие моментов (М = М с ). Следовательно, устойчивая работа электродвигателя будет теперь в точке 3 на характеристике b.
Аналогичным образом происходит переход на характеристики с и d при включении сопротивлений R 2 и R 3 .
Для увеличения скорости вращения электродвигателя необходимо отключить часть дополнительного сопротивления. Например, если электродвигатель устойчиво работает в точке 7 на характеристике d, то при отключении сопротивления R 3 (при замыкании контактов 3У) происходит переход на работу по характеристике с. При этом первоначально (в точке 8) резко увеличивается ток и момент электродвигателя и скорость начинает возрастать. В точке 5 восстанавливается равновесие моментов и увеличение скорости прекращается. При последовательном отключении остальных ступеней регулировочного реостата происходит постепенное возрастание скорости вращения до величины n 1 .
Данный способ регулирования скорости вращения отличается простотой электрической схемы и применяется сравнительно часто для электродвигателей крановых механизмов. Однако ему присущи и некоторые существенные недостатки. В частности, регулирование скорости рассмотренным способом сопровождается большими .потерями мощности в реостате. Поэтому стараются применять его лишь в тех случаях, когда мощность электродвигателя невелика или снижение скорости вращения должно быть кратковременным. Большим недостатком является также громоздкость и высокая стоимость регулировочного реостата, который должен быть рассчитан на номинальный ток электродвигателя. Это заставляет уменьшать число ступеней реостата и предусматривать специальные меры для его охлаждения.
Регулирование скорости вращения изменением магнитного потока. Если в цепь обмотки возбуждения включить последовательно реостат (см. рис. 10), то скорость вращения электродвигателя с параллельным возбуждением можно регулировать изменением магнитного потока. Для этого необходимо изменять величину сопротивления цепи возбуждения. Изменение сопротивления приводит к изменению тока возбуждения и, следовательно, к изменению магнитного потока электродвигателя. Очевидно, при отсутствии дополнительного сопротивления в цепи возбуждения магнитный поток электродвигателя имеет максимальное значение. Ему соответствуют естественные скоростная и механическая характеристики.
При введении же дополнительного сопротивления в цепь возбуждения магнитный поток уменьшается, а скорость увеличивается, причем, различным значениям магнитного потока соответствуют различные искусственные скоростная и механическая характеристики (рис. 13). Уравнения этих характеристик н.ичем не отличаются от уравнений (25) и (29).
Из уравнений вытекает, что характеристики при различных значениях магнитного потока остаются прямолинейными, причем меньшим значениям магнитного потока соответствуют большие значения скорости холостого хода. По мере снижения магнитного потока возбуждения жесткость характеристик электродвигателя несколько уменьшается, что объясняется влиянием реакции якоря.
Как было показано, в случае регулирования скорости изменением сопротивления в цепи якоря переход с одной характеристики на другую осуществляется практически при постоянной скорости. Это объясняется малой индуктивностью якоря, благодаря чему ток якоря изменяется практически мгновенно.
Обмотка же возбуждения электродвигателя .параллельного возбуждения обладает значительной индуктивностью. Поэтому в случае регулирования скорости изменением сопротивления цепи возбуждения переход с одной характеристики на другую осуществляется по так называемым динамическим характеристикам, которые могут быть построены в результате расчета переходных процессов. На рис. 13 динамические характеристики показаны пунктирной линией.

Регулирование скорости вращения электродвигателей с параллельным возбуждением изменением магнитного потока сопровождается незначительными потерями мощности в регулировочном реостате и является экономичным. Незначительные потери дают возможность использовать реостат небольших габаритов и веса, с большим числом регулировочных ступеней, что позволяет получить плавное, практически бесступенчатое регулирование скорости.
Недостатком данного способа регулирования скорости является ухудшение коммутации и снижение перегрузочной способности электродвигателя при повышенных скоростях. Скорость же при этом способе регулирования может изменяться только лишь в сторону увеличения по сравнению с номинальной, что сильно ограничивает применение данного способа. При больших нагрузках данный способ регулирования скорости вообще неприменим, так как снижение магнитного потока уменьшает вращающий момент и при переходе к высшей скорости может возникнуть недопустимо большой ток.
Регулирование скорости вращения изменением напряжения на зажимах якоря (система генератор—двигатель). В целях широкого и плавного регулирования скорости иногда применяют так называемую систему генератор—двигатель (сокращенно система Г—Д), которая позволяет использовать метод регулирования скорости изменением напряжения, подводимого к якорю электродвигателя. При питании электродвигателя от сети такой метод совершенно неприменим. Его применение возможно лишь при питании электродвигателя от отдельного генератора.

Обычно система Г—Д состоит из приводного двигателя ПД, генератора Г с возбудителем В и исполнительного электродвигателя ИД (рис. 14). Приводной электродвигатель питается от сети и служит для приведения во вращение генератора. Чаще всего в качестве приводного электродвигателя используется асинхронный короткозамкнутый электродвигатель, получающий питание от сети трехфазного тока. Он имеет постоянное направление вращения и вращается с постоянной скоростью. Исполнительный электродвигатель получает питание от генератора Г и приводит в действие механизм.
Генератор и исполнительный электродвигатель имеют независимое возбуждение. Их обмотки возбуждения ОВГ и ОВД питаются от возбудителя В, небольшого генератора постоянного тока, сидящего на одном валу с приводным электродвигателем ПД и генератором Г. Если в цепь обмотки ОВГ включить регулировочный реостат, то, изменяя величину его сопротивления, можно изменять скорость вращения исполнительного электродвигателя, так как при этом будет меняться величина напряжения генератора. Действительно, для цепи генератор—двигатель по II закону Кирхгофа можно составить следующее уравнение:

где Е г и Е д — соответственно э.д.с. генератора и электродвигателя;
R г и R д — соответственно сопротивление якорей генератора
и электродвигателя. Заменив э. д. с. электродвигателя, согласно выражению (7),. получим

Выражение (41) является уравнением скоростной характеристики исполнительного электродвигателя в системе Г—Д. Заменив в нем ток якоря выражением (28), получим уравнение механической характеристики

Уравнения (41) и (42) показывают, что путем изменения Е г можно изменять скорость вращения исполнительного электродвигателя. Следовательно, при уменьшении сопротивления регулировочного реостата R p скорость исполнительного электродвигателя будет возрастать, а при увеличении сопротивления—уменьшаться, так как э. д. с. генератора Е г зависит от величины тока в обмотке ОВГ.
Нетрудно заметить, что механические и скоростные характеристики электродвигателя в системе Г—Д представляют собой прямые линии. Скорость холостого хода определяется первым членом правой части уравнения (41) или (42) и не остается постоянной величиной при различных значениях сопротивления R р , т. е. каждому значению сопротивления R р соответствует своя скоростная и механическая характеристики (рис. 15). Эти характеристики являются достаточно жесткими, что позволяет при применении специальных регулируемых электродвигателей получить широкий диапазон скоростей в пределах 1 : 100 и более, что является одним из основных положительных качеств системы Г—Д.

Иногда регулировочный реостат включают не только в цепь обмотки ОВГ, но в цепь обмотки возбуждения ИД, что дает возможность регулировать скорость вверх от номинальной.
Регулирование скорости по системе Г—Д является весьма экономичным, так как все переключения происходят в цепях обмоток возбуждения, где токи сравнительно невелики. Относительно небольшие мощности и габариты регулировочных реостатов позволяют получить большое число регулировочных ступеней и, следовательно, достаточно плавное регулирование скорости. Возможно также применение реостатов со скользящими контактами, что позволяет получить бесступенчатое регулирование скорости.
Система Г—Д очень удобна не только в отношении широты и плавности регулирования скорости. Она позволяет также очень просто производить реверс и торможение исполнительного электродвигателя. Так, для осуществления реверса необходимо, как известно, изменить полярность на зажимах якоря электродвигателя. Для этого достаточно изменить направление тока в обмотке ОВГ (или в обмотке ОВД). Для осуществления торможения достаточно отключить от возбудителя обмотку ОВГ. Небольшие размеры регулировочных реостатов позволяют широко использовать дистанционное управление системой Г—Д, что также является большим ее преимуществом.
Основной недостаток системы генератор—двигатель — большое количество электрических машин, высокая стоимость и относительно низкий к. п. д. установки, что, естественно, ограничивает область применения дайной системы.
Источник



