
Тахогенераторы — виды, устройство и принцип работы
Слово «тахогенератор» происходит от двух слов — от греческого «тахос», означающего «быстрый» и от латинского «генератор». Тахогенератор представляет собой измерительную электрическую микромашину переменного или постоянного тока, которая монтируется на вал оборудования, и преобразует текущее значение частоты вращения вала в электрический сигнал, определенный параметр которого несет информацию о частоте вращения.
Таким параметром может выступать величина генерируемой ЭДС или значение частоты сигнала. Выходной сигнал с тахогенератора может подаваться на средство визуального отображения (например на дисплей) или на устройство автоматического управления частотой вращения вала, на котором работает данный тахогенератор.
Тахогенераторы бывают нескольких типов, в зависимости от вида сигнала, генерируемого на выходе: с сигналом переменного напряжения или тока (асинхронные или синхронные тахогенераторы), либо с сигналом постоянного тока.

Тахогенератор постоянного тока
Тахогенератор постоянного тока представляет собой коллекторную машину с возбуждением либо от постоянных магнитов (встречаются чаще), либо от обмотки возбуждения (встречаются реже), располагаемых на ее статоре. Измерительная ЭДС наводится на обмотку ротора тахогенератора, и оказывается прямо пропорциональна угловой скорости вращения ротора, по сути — скорости изменения магнитного потока, в точном соответствии с законом электромагнитной индукции.
Выходной сигнал — напряжение, величина которого также прямо пропорциональна угловой скорости вращения ротора — снимается через щетки с коллектора. Поскольку в работе участвуют коллектор и щетки, такой агрегат подвержен более скорому износу, чем тахогенератор переменного тока. Проблема еще и в том, что щеточно-коллекторный узел в процессе своей работы порождает импульсные помехи в выходном сигнале такого тахогенератора.

Так или иначе, выходным сигналом у тахогенератора постоянного тока является напряжение, что создает трудности с точным преобразованием напряжение-скорость, ведь магнитный поток подмагничивания зависит от температуры магнитов, от электрического сопротивления в месте контакта щеток с коллектором (которое со временем изменяется), наконец — от размагничивания постоянных магнитов с течением времени.
Тем не менее, в некоторых случаях тахогенераторы постоянного тока оказываются удобны формой представления выходного сигнала, а также закономерным явлением смены полярности данного сигнала в соответствии с изменением направления вращения вала.
Тахогенераторы постоянного тока характеризуются «коэффициентом преобразования» St, который выражает отношение снимаемого напряжения Uout к соответствующей данному напряжению частоте вращения Frot. Этот параметр дается в технической документации на тахогенератор, и измеряется в милливольтах, умноженных на обороты в минуту. Зная данный параметр и выходное напряжение с тахогенератора, можно вычислить текущую частоту по формуле:
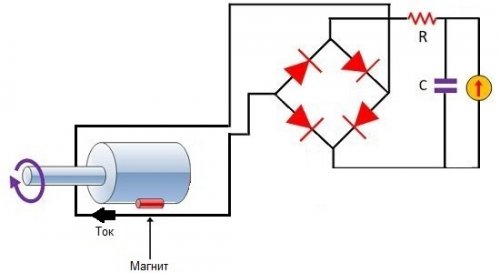
Электродвигатель со встроенным тахогенератором:
Асинхронный тахогенератор переменного тока
Асинхронные тахогенераторы переменного тока похожи по устройству на асинхронные двигатели с короткозамкнутым ротором. Ротор здесь изготавливается в виде полого цилиндра (обычно медного или алюминиевого), а статор содержит две обмотки, расположенные под прямым углом друг к другу. Одна из обмоток статора — обмотка возбуждения, вторая — выходная. На обмотку возбуждения подается переменный ток с определенной амплитудой и частотой, а выходная обмотка присоединяется к измерительному прибору.
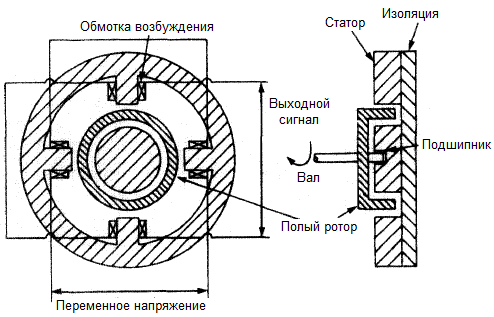
Когда короткозамкнутый ротор вращается, он периодически нарушает изначальную ортогональность магнитных потоков двух обмоток, в результате искажения картины магнитных полей, в выходной обмотке периодически наводится ЭДС. Если же ротор неподвижен, то магнитный поток обмотки возбуждения не искажается, и в выходной обмотке ЭДС не наводится. Здесь величина генерируемой ЭДС пропорциональна частоте вращения вала.
Поскольку подаваемый на обмотку возбуждения ток имеет собственную частоту, отличную от частоты вращения вала, такой тахогенератор именуется асинхронным. Кроме прочего, данная конструкция позволяет по фазе выходного сигнала судить о направлении вращения ротора, — при смене направления вращения фаза переворачивается.
Синхронный тахогенератор переменного тока
Синхронные тахогенераторы представляют собой бесколлекторные машины переменного тока. Намагниченность ротора создается постоянным магнитом, на статоре же присутствуют одна или более обмоток. В данном случае и амплитуда выходного сигнала, и его частота, — будут пропорциональны частоте вращения вала. Поэтому данные о скорости можно измерять как по значению амплитуды (детектирование по амплитуде), так и непосредственно по частоте (детектирование по частоте). Однако направление вращения по выходному сигналу синхронного тахогенератора не определить.
Ротор синхронного тахогенератора переменного тока может быть выполнен в виде многополюсного магнита, и на один оборот вала давать в выходном сигнале несколько импульсов подряд. Такие тахогенераторы, наравне с асинхронными, отличаются более длительным сроком службы, поскольку в них нет щеточно-коллекторного узла, склонного к механическому износу.
Детектирование по частоте
Поскольку у синхронного тахогенератора частота на выходе от температуры и других факторов не зависит, то измерения частоты с ним получаются более точными. Вычисление осуществляется очень просто, достаточно знать количество пар полюсов p на роторе:
 Но есть и нюанс. Чтобы точность вычислений получилось достаточно высокой, необходимо затратить время, за которое теоретически скорость может уже измениться, а это значит, что пока импульсы считаются, нарастает погрешность измерения, что вредно.
Но есть и нюанс. Чтобы точность вычислений получилось достаточно высокой, необходимо затратить время, за которое теоретически скорость может уже измениться, а это значит, что пока импульсы считаются, нарастает погрешность измерения, что вредно.
Дабы погрешность при измерении снизить, ротор делают многополюсным, чтобы вычисления можно было осуществить быстрее, тогда и реакция регулирующей системы может последовать более скоро. Для одного полюса частота вычисляется по следующей формуле:
где N — количество считанных импульсов, Т — период считывания импульсов
У синхронного тахогенератора амплитуда сигнала изменяется в зависимости от скорости, поэтому при проектировании выходного частотного детектора важно учесть весь возможный диапазон амплитуд выходных напряжений тахогенератора.
Детектирование по амплитуде
При амплитудном способе определения частоты схема частотного детектора будет проще, но здесь важно учесть влияние таких факторов, как: температура, изменение немагнитного зазора и т. д. Чем выше частота — тем больше амплитуда выходного сигнала, поэтому схема детектора обычно представляет собой выпрямитель и НЧ-фильтр, где коэффициент преобразования, измеряемый в мВ*об/мин, позволяет определить частоту по следующей формуле:
Кроме рассмотренных в данной статье традиционных типов тахогенераторов, в современной технике также применяются импульсные датчики на базе оптронов, датчиков Холла и т. д. Достоинство тахогенераторов заключается в том, что в паре с детектором они не требуют никаких дополнительных источников питания. К недостаткам традиционных тахогенераторов машинного типа относятся: плохая чувствительность на низких скоростях и вносимый тормозящий момент.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
§ 30.2. Тахогенератор постоянного тока
Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования. Тахогенератор постоянного тока представляет собой генератор малой мощности с электромагнитным независимым возбуждением (рис. 30.3, а) или с возбуждением постоянными магнитами.
Ввиду того что при постоянном токе возбуждения магнитный поток Ф практически не зависит от нагрузки, выходная ЭДС тахогенератора  прямо пропорциональна частоте вращения:
прямо пропорциональна частоте вращения:
 , (30.5)
, (30.5)
где  .
.
Формула (30.5) справедлива и для тахогенератора с возбуждением постоянными магнитами, где . Для измерения частоты вращения тахогенератором вал последнего механически соединяют с валом механизма, частоту вращения которого требуется измерить. На выводы тахогенератора подключают измерительный прибор со шкалой, градуированной в единицах частоты вращения.
Точность работы тахогенератора определяется его выходной характеристикой, представляющей собой зависимость выходного напряжения от частоты вращения при неизменном значении сопротивления нагрузки. Наиболее точная работа тахогенератора соответствует прямолинейной выходной характеристике (рис. 30.3, б, прямая 1).
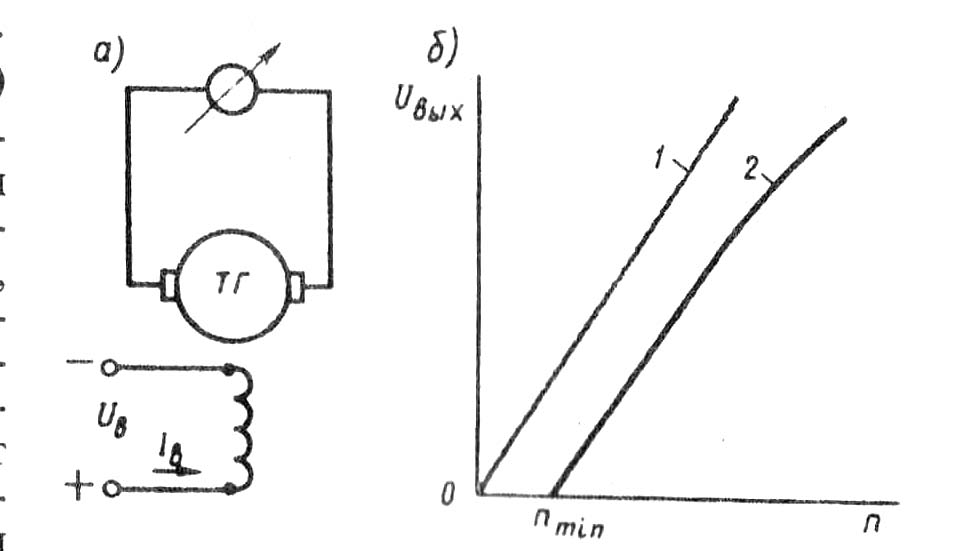
Рис. 30.3. Принципиальная схема  , выходная характеристика
, выходная характеристика  тахогенератора постоянного тока
тахогенератора постоянного тока
Однако в реальных тахогенераторах выходная характеристика не прямолинейна (график 2) и к тому же она выходит не из начала осей координат. Основная причина криволинейности характеристики — реакция якоря, поэтому уменьшению криволинейности этой характеристики способствует включение на выход тахогенератора приборов с большим внутренним сопротивлением, так как при уменьшении тока якоря ослабляется действие реакции якоря. В современных тахогенераторах отклонение выходной характеристики от прямолинейной составляет от 0,5 до 3%.
Падение напряжения в щеточном контакте  создает в тахогенераторе зону нечувствительности. Это диапазон частот вращения от 0 до
создает в тахогенераторе зону нечувствительности. Это диапазон частот вращения от 0 до  , в котором напряжение на выходе генератора равно нулю. Граница зоны нечувствительности определяется выражением
, в котором напряжение на выходе генератора равно нулю. Граница зоны нечувствительности определяется выражением
 . (30.6)
. (30.6)
Широкое применение получили тахогенераторы постоянного тока, возбуждаемые постоянными магнитами. Эти тахогенераторы не имеют обмотки возбуждения, и поэтому они проще по конструкции и имеют меньшие габариты.
§ 30.3. Бесконтактный двигатель постоянного тока
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них щеточно-коллекторный узел заменен полупроводниковым коммутатором (инвертором), управляемым сигналами, поступающими с бесконтактного датчика положения ротора. Рабочая обмотка двигателя — обмотка якоря — расположена на сердечнике статора, а постоянный магнит — на роторе.
Вал двигателя Д (рис. 30.4, а) механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР — выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
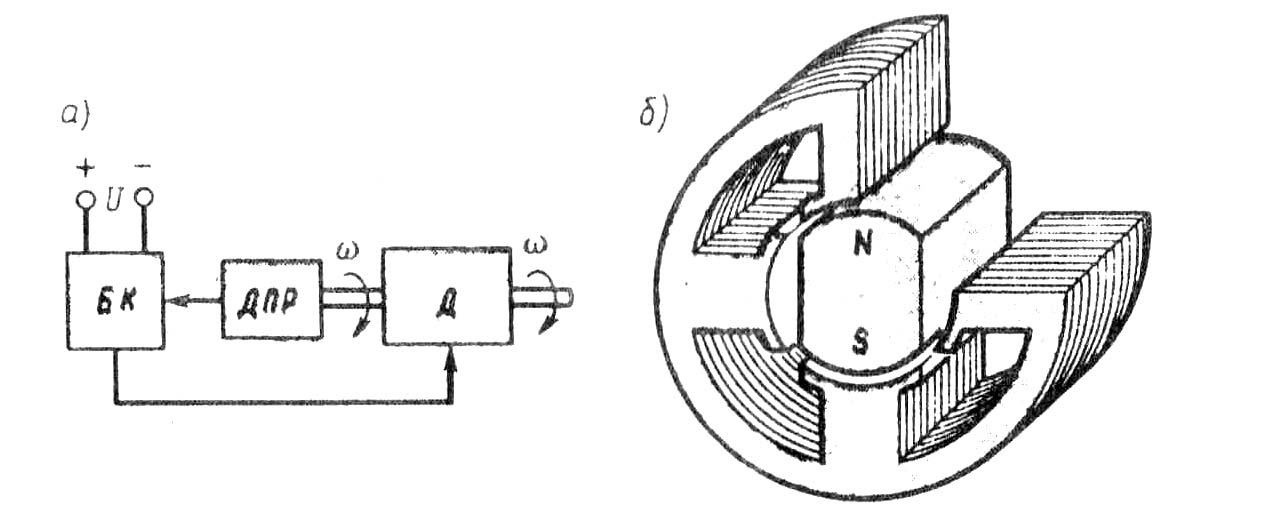
рис. 30.4. Бесконтактный двигатель постоянного тока:
— блок-схема, — магнитная система
В качестве датчиков положения ротора применяют чувствительные различные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора. Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т. п.), на которые рассчитан двигатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п. Наиболее целесообразно использовать датчики ЭДС Хота (рис. 30.5), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактны-
ми площадками, к которым припаяны выводы /—2, подключенные к источнику напряжения , и выводы 3—4, с которых снимают выходной сигнал . Если в цепи 1—2 проходит ток , а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение . Значение ЭДС зависит от тока и магнитной индукции В, а полярность — от направления тока в цепи 1—2 и направления вектора магнитной индукции В.
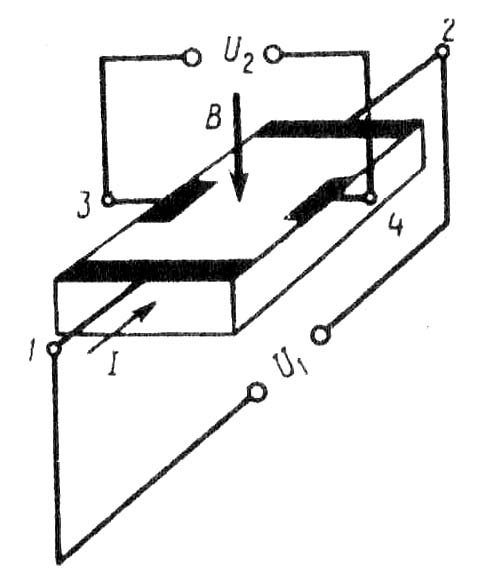
Рис. 30.5. Датчик ЭДС Холла
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах VТ1—VТ4 (рис. 30.6). Четыре обмотки (фазы) двигателя  расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1—VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2) осуществляется от источника напряжением .
расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1—VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2) осуществляется от источника напряжением .
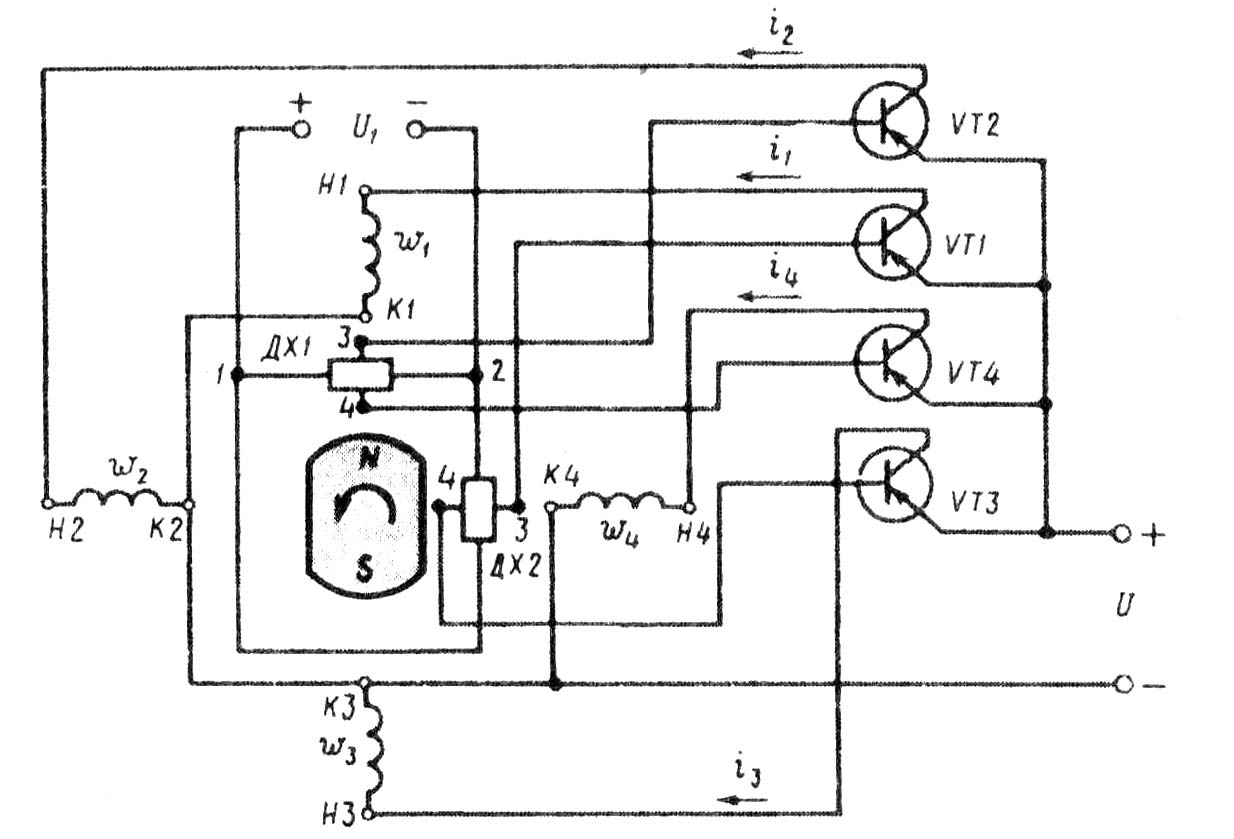
Рис. 30.6. Принципиальная схема БДПТ
Каждая обмотка (фаза) выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 30.7). Если по какой-либо из обмоток (фаз) статора проходит ток от начала Н1—Н4 к концу К1—К4, то полюсы сердечника статора приобретают полярность соответственно S и N.
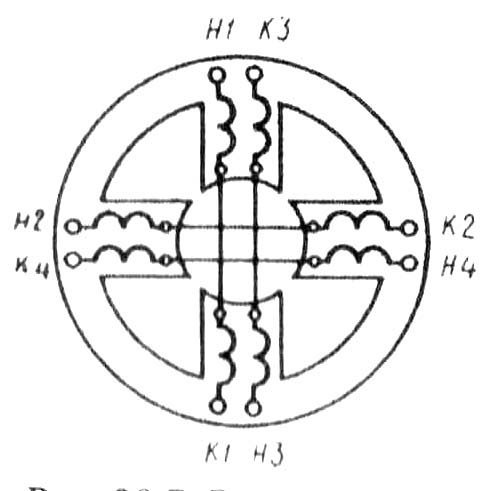
Рис. 30.7. Расположение обмоток фаз на полюсах статора БДПТ
При положении ротора, показанном на рис. 30.6, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор VТ2 переходит в открытое состояние. В обмотке (фаза) статора  появляется ток
появляется ток  , протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке
, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке  возникает ток
возникает ток  и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2—4 на угол 45 0 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2—4 еще на 45 0 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2—4 на угол 45 0 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2—4 еще на 45 0 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
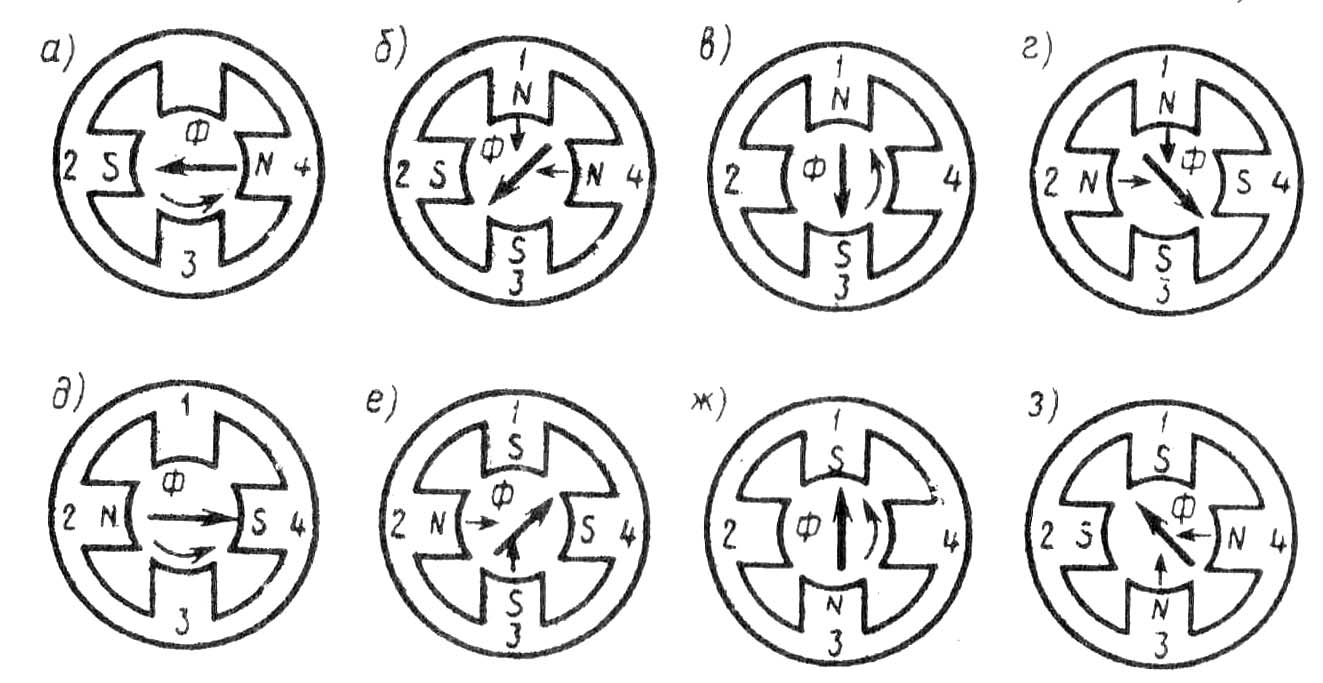
Рис. 30.8. Магнитное поле статора в четырехполюсном БДПТ
На рис. 30.9 показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников 1 сердечника статора.
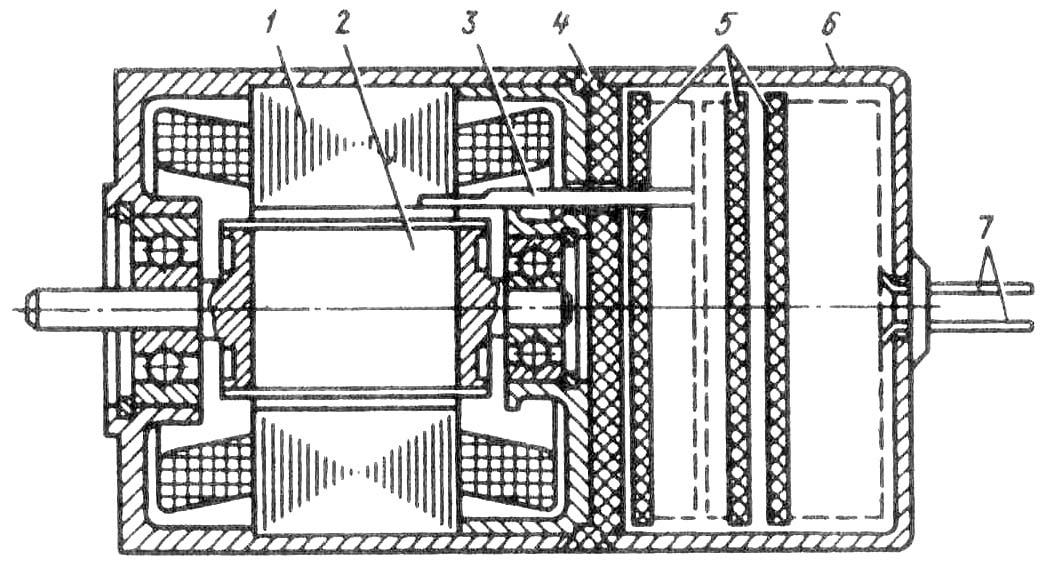
Рис. 30.9. Устройство БДПТ
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Источник



