
Черчение
Классификация нагрузок
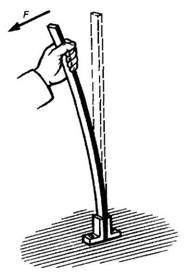
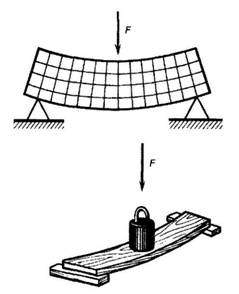
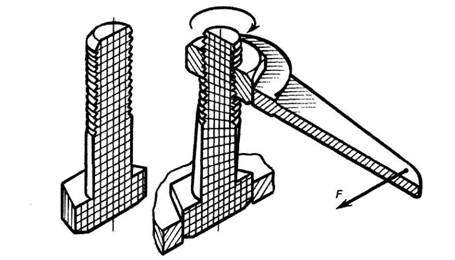
Воздействия, испытываемые стойкой от согнувшей ее руки (см. рис. 42), доской от груза (см. рис. 44), цилиндрическим стержнем болта при навинчивании гайки гаечным ключом (см. рис. 45) и т. д., представляют собой внешние силы или нагрузки. Силы, возникающие в местах закрепления стойки и опирания доски, называются реакциями.
По способу приложения нагрузки делятся на сосредоточенные и распределенные (рис. 49).
Виды и классификация нагрузок:
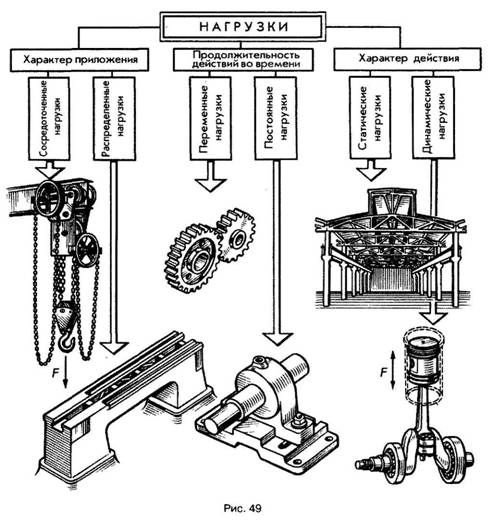
Сосредоточенные нагрузки передают свое действие через,очень малые площади. Примерами таких нагрузок могут служить давление колес железнодорожного вагона на рельсы, давление тележки тали на монорельс и т. д.
Распределенные нагрузки действуют на сравнительно большой площади. Например, вес станка передается через станину на всю площадь соприкосновения с фундаментом.
По продолжительности действия принято различать постоянные и переменные нагрузки. Примером постоянной нагрузки может служить давление подшипника скольжения — опоры валов и осей — и его собственный вес на кронштейн.
Переменной нагрузке подвержены в основном детали механизмов периодического действия. Одним из таких механизмов служит зубчатая передача, у которой зубья в зоне контакта смежных пар зубчатых колес испытывают переменную нагрузку.
По характеру действия нагрузки могут быть статическими и динамическими. Статические нагрузки почти не изменяются в течение всего времени работы конструкции (например, давление ферм на опоры).
Динамические нагрузки действуют непродолжительное время. Их возникновение связано в большинстве случаев с наличием значительных ускорений и сил инерции.
Динамические нагрузки испытывают детали машин ударного действия, таких, как прессы, молоты и т. д. Детали кривошипно-шатунных механизмов также испытывают во время работы значительные динамические нагрузки от изменения величины и направления скоростей, то есть наличия ускорений.
Источник
Нагрузки можно разделять по характеру действия во времени, по способу их приложения, в зависимости от назначения при эксплуатации самого сооружения и т. д
По характеру действия во времени различают статические и динамические нагрузки. Статическую нагрузку принимают не зависящей от времени, она передается на сооружение спокойно, плавно, без толчков и вибраций, ее считают медленно возрастающей от нуля до конечного значения. Динамическая нагрузка быстро меняется со временем; при расчете сооружения на динамическую нагрузку необходимо вводить силы инерции системы, возникающие при колебаниях, и динамические эффекты действия нагрузки.
По способу приложения различают сосредоточенный груз и сплошную нагрузку, распределенную по площади или по линии.
Сосредоточенный г р у з — нагрузка в виде силы, приложенной в одной точке.
Сплошная нагрузка — распределенная непрерывно по данной площади или по данной линии. Линейная сплошная нагрузка, распределенная по длине, измеряется интенсивностью ее, т. е. нагрузкой, приходящейся на единицу длины в данной точке. Поверхностная нагрузка измеряется нагрузкой, действующей на единицу поверхности в данной точке. Интенсивность линейно распределенной нагрузки измеряется в килоньютонах на метр погонной длины, а интенсивность поверхностно распределенной нагрузки — в килоньютонах на квадратный метр.
В зависимости от назначения различают постоянную, временную и подвижную нагрузки. Постоянная н а г р у з к а — нагрузка, которая постоянно действует на сооружение (собственный вес, усилия предварительного натяжения и т. п.). Временная нагрузка действует на сооружение в отдельные промежутки времени, в другие же периоды она может отсутствовать (давление ветра, снега; полезная нагрузка, воспринимаемая сооружением). Подвижная нагрузка та, которая занимает различное положение на сооружении (поезд, автомобиль, толпа людей). По действующим нормативным документам различают основные сочетания нагрузок (состоят из постоянных и временных), дополнительные сочетания (включают и кратковременные нагрузки) и особые сочетания (сейсмические, аварийные и др.).
Классификация сооружений и их расчетных схем.
Различают сооружения плоские и пространственные, которые подразделяют по виду соединений в узлах; по геометрическому типу элементов, составляющих сооружение; по особенностям работы сооружения и т. д.
Все сооружения, в действительности пространственные, имеют три измерения, однако в ряде случаев заменяют пространственные сооружения плоскими, представляющими данное пространственное. Плоским сооружением называют систему, осевые линии всех элементов которой расположены в одной плоскости.
По геометрическому типу элементов сооружения могут быть стержневыми, пластинчатыми и массивными. Сооружения, составленные из стержней (рис. 1.6,а), называют стержневыми. Сооружения, представляющие собой систему пластинок (рис. 1.6,б), будем называть пластинчатыми. На рис. 1.6,а,б представлены элементы сооружений.
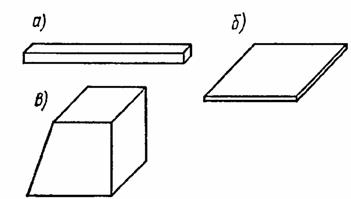
Рисунок 1.6 Элементы сооружений
Сооружения, три основных размера которых одного и того же порядка (рис. 1.6,в), называют массивными (например, подпорная стенка).
По виду соединений в узлах сооружения делятся на системы с шарнирными и с жесткими узлами. В качестве примера первой системы можно указать ферму с шарнирными узлами, в качестве примера второй — раму с жесткими узлами.
По особенностям работы сооружений различают балочные, рамные, арочные и висячие системы.
Балка представляет собой прямолинейный брус, работающий на изгиб. Балка при наличии обычной горизонтальной подвижной опоры является безраспорной системой, в которой вертикальная нагрузка вызывает только вертикальные опорные реакции.
В распорной системе с криволинейным или многоугольным очертанием оси (рама, арка) вертикальная нагрузка помимо вертикальных вызывает и горизонтальные составляющие реакций — распоры.
Рамой называют стержневую систему преимущественно с жесткими соединениями в узлах; стержни рамы работают одновременно на изгиб и осевое действие сил, причем изгибная деформация в раме преобладает.
Аркой называют криволинейный брус, закрепленный неподвижно двумя концами. Арка со сплошной стенкой работает на осевое сжатие и изгиб.
При наличии идеально шарнирного соединения стержней во всех узлах систему называют шарнирно-стержневой фермой или просто фермой. Все стержни фермы при узловой нагрузке работают только на осевое действие сил.
Часто применяют висячие системы, в которых цепи или кабели поддерживают балочную часть. В идеальной гибкой цепи или гибком кабеле возникает только растяжение.
Сооружения можно разделить на статически определимые, усилия в которых определяются только с помощью одних уравнений статики, и статически неопределимые, расчет которых производится с дополнительным использованием уравнений связности деформаций. Применяются также методы расчета сооружений по допускаемым напряжениям и по предельным состояниям, методы расчета на основе точной и приближенной теорий и т. д.
Основные положения строительной механики. Основные исходные положения строительной механики при решении задач упругого расчета сооружений те же, что и сопротивления материалов:
1. Предположение об идеальной упругости и непрерывности материала, из которого состоит сооружение. Однако в специальном разделе курса рассматриваются методы расчета сооружений с учетом развивающихся и пластических деформаций. В настоящее время ряд конструкций рассчитывается по методу предельных состояний .
2. Применение линейной связи между напряжением и деформацией (закон Гука). Отметим, что существуют тела, поведение которых в известных границах можно считать нелинейно упругим, т. е. в которых остаточных деформаций не возникает, но зависимость между напряжением и деформацией нелинейна.
3. Применение принципа независимости действия, согласно которому результат действия системы сил равен сумме результатов действия отдельных сил. Этот принцип применим только к относительно жестким сооружениям, и использование его при расчете существенно гибких систем в области больших деформаций недопустимо.
Системы, геометрически изменяемые и неизменяемые. Сооружение должно быть геометрически неизменяемым, т. е. постоянно сохранять геометрическую форму, заданную при возведении. При расчете сооружений нередко используют основную схему в виде так называемой кинематической цепи — изменяемой системы. Важно знать степень свободы кинематической цепи и уметь перейти от этой цепи к неизменяемой системе путем введения соответствующих связей.
|
 |
С т е п е н ь ю свободы системы называется число независимых геометрических перемещений, определяющих ее положение (например, линейных перемещений узлов). Степень свободы шарнирного четырехугольника по рис. 1.7, б равна единице (достаточно поставить раскос 02, чтобы обратить систему в неизменяемую).
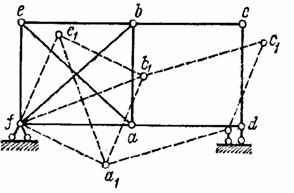
Формула для определения числа связей плоской стержневой системы. Рассмотрим плоские шарнирно-стержневые системы стержней или дисков. Пусть задана шарнирно-стержневая система по рис.1.8, в которой шесть шарнирных узлов связаны стержнями аb, ас, аd. Установим соотношение между числом узлов системы k и числом стержней s. Под k понимаем число узлов без опорных, а под s—число стержней вместе с опорными. При отсутствии всех s стержней системы степень свободы будет 2k, так как степень свободы каждого узла на плоскости равна двум. При наличии связей числом s = 2k система может быть неподвижна, если стержни расположены целесообразно. Условие неизменяемости системы будет s = 2k.
Для системы по рис. 1.8: s=12, k = 6.

|
В качестве примера приведем ферму, в первой панели которой имеется два раскоса, а во второй раскоса нет (рис. 1.9). Общее число стержней и узлов в данном случае s = 12; k = 6, т. е. s = 2k. Однако система изменяема, так как она сводится к шарнирному четырехугольнику (имеем диск (неизменяемую часть) abef, который заменяем одним стержнем).
Простейшие геометрические признаки неизменяемости систем. Для окончательного суждения о неизменяемости системы необходимо провести соответствующий анализ ее геометрической структуры. Наиболее целесообразным и общим является геометрический метод исследования неизменяемости, основанный на использовании свойств геометрических фигур.
Первый признак геометрической неизменяемости: ферма неизменяема, если она составлена из шарнирных треугольников (рис. 1.9), поскольку треугольник — неизменяемая геометрическая фигура.

В данном случае к исходному треугольнику abc каждый последующий узел 1, 2, 3, 4 и т. д. прикрепляется двумя стержнями, вследствие чего создается новый треугольник. Прикрепление узла 1 к узлам b и с двумя стержнями 1b и 1с, не лежащими на одной прямой, равносильно созданию шарнирно-стержневого неизменяемого треугольника.
Более общий признак геометрической неизменяемости ферм следующий: ферма неизменяема, если каждый последующий узел прикрепляется к двум предшествующим узлам двумя стержнями, осевые линии которых не лежат на одной прямой. Такой структурой обладают все простейшие фермы, представляющие собой совокупность диад (диада — пара наклонных стержней, связанных общим узлом).
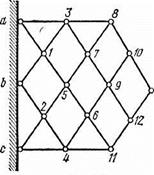
На рис. 1.10 изображена консольная ферма с ромбической решеткой, к узлам a, b и с которой двумя стержнями каждый прикрепляются узлы 1, 2, 3, 4, 5, 6 и т. д.
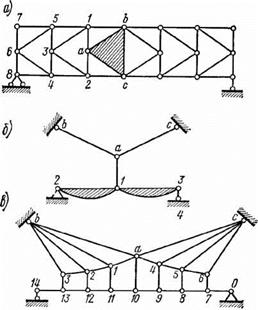
На рис. 1.11 приведен ряд ферм, образованных по указанному общему признаку. Выделен основной треугольник — геометрический базис, к которому присоединяются все остальные узлы фермы; последовательность их прикрепления отмечена цифрами.
 |
Указанные два признака создания геометрически неизменяемых шарнирно-стержневых систем, однако, неприменимы для анализа геометрической неизменяемости любых ферм. Общим методом исследования неизменяемости является анализ определителя системы уравнений для всех усилий в стержнях данной фермы при действии на нее произвольной нагрузки.
Мгновенно изменяемая система. Выше было установлено, что при прикреплении данного узла двумя стержнями осевые линии стержней не должны располагаться на одной прямой, иначе говоря, не должно находиться на одной прямой три шарнира. Случай прикрепления узла двумя стержнями аb и ас, лежащими на одной прямой (рис. 1.12, а), дает мгновенно изменяемую систему:

точка а вследствие фиксации ее положения касающимися дугами окружностей радиусов аb и ас может получить бесконечно малое смещение (точка a1). Конечное же смещение точки а возможно лишь в результате удлинения стержней; при этом система обращается в неизменяемую, так как шарниры а, b и с уже не будут лежать на одной прямой.
Мгновенно изменяемой называют систему, которая оказывается изменяемой лишь в первый момент приложения соответствующей нагрузки.
Дадим статическую характеристику мгновенно изменяемой системы для данного частного случая. Предположим, что стержни ab и ас не лежат на одной прямой (рис. 1.12, б); определим усилия X для случая симметричного расположения стержней. Проектируя все силы, приложенные к узлу а, на вертикальную ось, находим
При стремлении α к нулю усилие X стремится к бесконечности. При малом значении α усилие X получает конечное очень большое значение. Когда же точка а незначительно отклоняется от прямой be,в стержнях ab и ас возникают усилия, вызывающие если не разрушение, то во всяком случае значительные деформации, что сопровождается резким опасным смещением точки а.
Итак, в случае прикрепления шарнира а двумя стержнями ab и ас, лежащими на одной прямой (три шарнира а, b, с — на одной прямой), система мгновенно изменяема.
Источник



