
Выбор способа движения и вида поворотов агрегата
Движение машинно-тракторных агрегатов при обработке участков характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения на обратное или под некоторым углом к законченному рабочему ходу. К элементам движения агрегатов относятся также дополнительные заезды и переезды.
Способы движения МТА (рис.1) и виды поворотов (рис.2) зависят от вида выполняемой работы, предъявляемых агролесотехнических требований, конструктивных особенностей рабочих машин, систем соединения с трактором и других факторов.
При работе различных МТА на одной и той же обрабатываемой площади (особенно на вырубке) кинематика их отличается незначительно. Поэтому студенты в курсовой работе разрабатывают кинематику только одного агрегата из числа применяемых в технологической карте.
Студенты должны выбрать способ движения агрегата и вид поворота и в зависимости от основных кинематических данных агрегата определить длину холостого хода (Lх.х) одного поворота агрегата и наименьшую ширину поворотной полосы (Е). Зависимость длины холостого хода одного поворота и ширины поворотной полосы от кинематических параметров агрегата и вида поворота приведены в таблице 2.
Влияние вида поворота на ширину поворотной полосы
и длину холостого хода МТА
| Виды поворота | Ширина поворотной полосы Е | Длина холостого хода Lх одного поворота агрегата |
| Беспетлевые: — круговой — с прямым участком — угловой | 1,1R+0,5В+l 1,1R+0,5В+l 1,1R+0,5В+l | (3,2…4,0)R+2l (1,4…2,0)R+X+2l (1,6…1,8)R+2l |
| Петлевые: — грушевидный — односторонний — закрытая петля | 2,8R+0,5В+l 2,6R+0,5В+l 2,0R+0,5В+l | (6,6…8,0)R+2l (6,0…7,5)R+2l (5,0…6,5)R+2l |
| Только с навесными орудиями: — с открытой петлей — с закрытой петлей — угловая петля — игольчатый | 1,1R+0,5В+l 1,1R+0,5В+l 1,2R+0,5lтр+l 1,2R+0,5lтр+l | (4,1…5,0)R+2l (5,0…5,5)R+2l (2,5…3,5)R+2l (2,8…4,0)R+2l |
Примечания: R – радиус поворота агрегата, м; В – ширина агрегата, м; l – длина выезда (въезда) агрегата, м; Х – длина прямого хода на поворотной полосе, м; lтр – длина трактора, м.

Рисунок 1. Основные способы движения МТА:
вразвал (а); всвал (б); чередованием способов всвал и развал (в); комбинированный (г); челночный (д); реверсивный (е); диагональный (ж); диагонально-поперечный (з); круговой (и); Е – ширина поворотной полосы
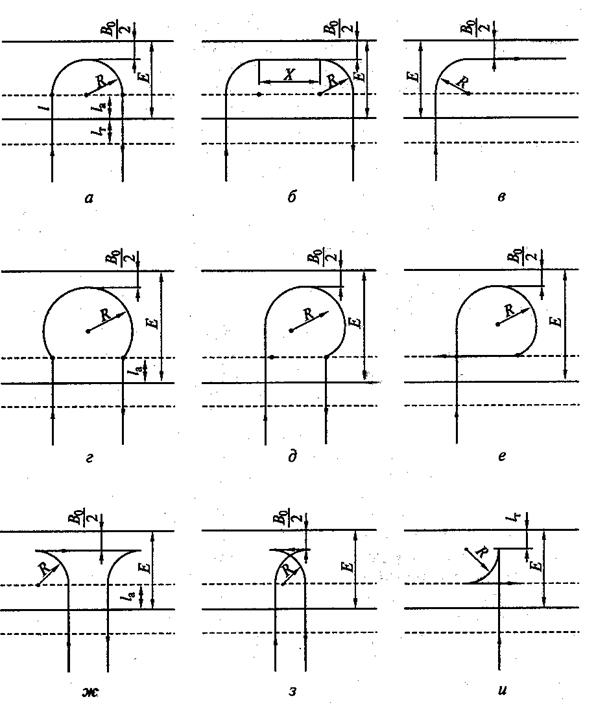
Рисунок 2. Основные виды поворотов лесохозяйственных агрегатов:
беспетлевые (а – круговой; б – с прямым участком; в – угловой); петлевые (г — грушевидный; д – односторонний; е – закрытая петля; ж – грибовидный с открытой петлей; з – грибовидный с закрытой петлей; и – угловая петля); Х – длина прямого хода на поворотной полосе; Во – ширина захвата лесохозяйственного агрегата; Е – ширина поворотной полосы; lа – длина агрегата; lт – длина трактора; R – радиус поворота
В практических расчетах радиус поворота принимается: для прицепных агрегатов с зубовыми боронами со сцепкой – равным ширине агрегата; с культиваторами, сеялками – 0,7-0,8 ширины МТА, в зависимости от числа машин в его составе. Для МТА с навесными рабочими машинами наименьший радиус поворота равен конструктивному радиусу поворота трактора.
При определении длины выезда агрегата (l), состоящего из колесного трактора и навешанных сзади рабочих машин, а также агрегатов с большим радиусом поворота принимают е = 0,1lк. Для агрегатов с прицепными машинами е = 0,5…0,75lк.
По направлению рабочих ходов различают три основные способа движения машинно-тракторных агрегатов: гоновые, комбинированные, челночные, реверсивные, диагональные и круговые.
При гоновых способах движения МТА выполняет рабочие ходы параллельно одной или двум сторонам рабочего участка с холостыми поворотами на обеих его концах. На прямоугольных участках с гоновым способом движения МТА наибольший эффект достигается при направлении гона агрегата по длинной стороне загона, так как в таких случаях уменьшается число поворотов.
К данной группе относятся способы движения МТА вразвал, всвал, чередование по загонам. Данные способы движения являются основными при основной вспашке лемешными многокорпусными плугами при обработке почвы в лесных питомниках, защитном лесоразведении. Основное преимущество способа чередования по загонам состоит в уменьшении числа свальных гребней и развальных борозд по сравнению с движением только всвал или вразвал.
Комбинированный способ движения позволяет уменьшить величину поворотных полос, повысить качество вспашки, уменьшить число развальных борозд. Этот способ применяется для частичной широкополосной обработке почвы для производства лесных культур, при защитном лесоразведении.
Челночный способ движения наиболее эффективен для простых одномашинных высокоманевренных МТА при выполнении таких операций, как частичная обработка почвы на вырубках, гладкая вспашка оборотными плугами на небольших участках лесных питомников.
Реверсивный способ движения применяется при выполнении механизированных работ в особо сложных условиях (лесоразведение на склонах и др.) при условии комплектования МТА с использованием тракторов, которые имеют фронтальные и задние навесные устройства для одновременного присоединения рабочих машин.
Диагональный способ движения применяется с целью достижения лучшего качества работ при бороновании, перекрестной междурядной культивации, когда рабочие ходы МТА необходимо выполнять под определенным углом к сторонам загона.
При круговом способе движения рабочие ходы совершаются без выключения рабочих органов вдоль всех четырех и более сторон рабочего участка. Круговые движения могут быть направлены от периферии к центру и, наоборот. В ряде случаев при изменении направления движения на угловых поворотах рабочие машины могут переводиться и в нерабочее положение.
Движение МТА в процессе работы на участке состоит из рабочих ходов и поворотов. При выборе вида поворота учитываются следующие требования: возможность его исполнения; соблюдение условий техники безопасности; достижение наибольшей производительности МТА и наименьшего расхода топлива, оставление возможно меньшей ширины поворотной полосы. Наиболее широко применяются на практике следующие группы поворотов: беспетлевые, петлевые и игольчатые.
Беспетлевые повороты делятся на три вида: круговой, поворот с прямым участком и угловой.
Из группы петлевых поворотов наиболее часто применяются грушевидный, односторонний и поворот с закрытой петлей.
Игольчатые повороты применяются при реверсивном способе движения МТА с фронтальной и задней навеской рабочих машин.
Источник
Способы движения агрегатов
Движение МТА при работе на участке характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения. Повторяющееся чередование рабочих ходов, поворотов и заездов называется способом движения агрегата. Насчитывается более 50 различных способов движения МТА.
При выборе способа движения МТА на данном участке поля необходимо учитывать возможность получения наибольшей производительности и экономичности работы агрегата с обязательным выполнением агротребований.
Основные способы движения:
1. Челночный ¾ гоновый петлевой способ (рис. 2.25). Используется в основном при работе симметричных агрегатов (посев, посадка, культивация и др.).
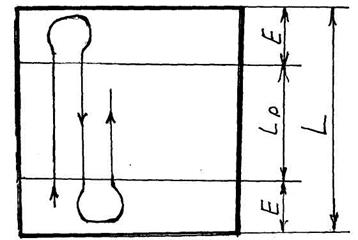
Рис. 2.25 Схема челночного способа движения агрегатов
Коэффициент рабочих ходов
j  .
.
Для определения j необходимо найти общую длину рабочих и холостых ходов на загоне (участке).
Если рабочая длина загона  , а его ширина С, ширина захвата агрегата
, а его ширина С, ширина захвата агрегата  , то общая длина рабочих ходов (м) :
, то общая длина рабочих ходов (м) :

где  ¾ число рабочих ходов на загоне.
¾ число рабочих ходов на загоне.
Число холостых поворотов на загоне, как правило, на один меньше, чем рабочих ходов. Однако, учитывая, что агрегат после обработки первого загона переезжает на второй, для расчетов можно принять количество рабочих и холостых ходов одинаковым, т.е.  .
.
j  .
.
Аналогично j можно определить и для других способов движения.
2. Гоновые способы движения всвал и вразвал (рис. 2.26) применяются при вспашке, уборке и других работах.

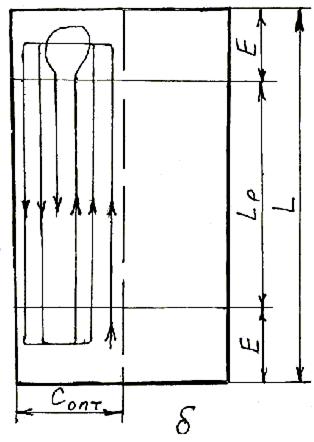
Рис. 2.26 Схема движения агрегата всвал (а) и вразвал (б)
При работе всвал и вразвал для уменьшения холостого пути участок целесообразно разбивать на загоны оптимальной ширины. Оптимальная ширина загона определяется по выражению:
 .
.
3. При уборке пропашных культур зачастую применяется беспетлевой способ движения с перекрытием.
4. Круговой способ движения применяется на уборке силосных, зерновых культур и других работах.
5. Диагонально-челночный и диагонально-перекрестный способы движения используются при бороновании, дисковании и других работах.
При изучении технологии механизированных работ будет более детально изучаться тот или иной способ движения.
При выборе способа движения в первую очередь исходят из агротехнических требований к качеству работы, удобству обслуживания, возможности уменьшения количества вспомогательных операций. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который обеспечивает максимальное значение j .
При работе МТА необходимо учитывать:
1) на коротких участках коэффициент рабочих ходов больше у агрегатов с меньшей шириной захвата;
2) чем больше радиус поворота (  ), тем меньше значение коэффициента
), тем меньше значение коэффициента
рабочих ходов (j);
3) чем больше длина гона  , тем меньше радиус поворота агрегата влияет на величину коэффициента рабочих ходов (j);
, тем меньше радиус поворота агрегата влияет на величину коэффициента рабочих ходов (j);
4) на участках с малой длиной гона целесообразно применять беспетлевой (лучше всего комбинированный) способ движения, а при больших
длинах гона ¾ петлевой (обычно с чередованием работы всвал и вразвал).
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник
Способы движения машинно-тракторных агрегат (Кинематика агрегатов)

Тема урока: Способы движения машинно-тракторных агрегат (Кинематика агрегатов)
Цель урока: Изучить способы движения, виды поворотов МТА.
Повторение пройденного материала по вопросам.
Объяснение нового материала по вопросам.
1. Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Под способом движения МТА подразумевается закономерность его перемещения по полю в процессе работы. Эта закономерность в основном определяется его геометрическими характеристиками: формой траектории; радиусом и видом поворота и т. д.
Подготовка полей в зависимости от выбранного способа движения предусматривает комплекс операций по разбивке поля на загоны требуемой формы и размера, обеспечивающие высокое качество технологического процесса и высокую производительность при возможно меньших затратах ресурсов.
Основной задачей кинематики агрегатов является обоснование методов выбора эффективных способов движения МТА и подготовки полей с учетом следующих основных требований:
— высокое качество выполняемой работы;
— высокая производительность при возможно меньших затратах топлива и других ресурсов на единицу выполненной работы;
— обеспечение безопасных условий работы для механизаторов;
— наименьшее отрицательное воздействие на окружающую среду (почву, культурные растения и т. д.).
Основные кинематические характеристики МТА зависят от конструктивных особенностей трактора, сцепки и рабочих машин. К таким характеристикам агрегата относятся: кинематический центр; кинематическая длина; длина выезда; кинематическая ширина; радиус и центр поворота; ширина колеи и продольная база трактора; ширина захвата.
Под кинематическим центром ц агрегата подразумевается условная геометрическая точка на плоскости движения (поверхности поля), траектория которой рассматривается как траектория МТА в процессе движения по полю. Такое упрощение приемлемо в связи с тем, что геометрические размеры МТА неизмеримо меньше размеров обрабатываемого участка или загона. Расположение центра агрегата ц зависит от типа трактора.

Рис. 1. Основные схемы расположения центра агрегата
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка ц определяется как проекция середины задней ведущей оси трактора на плоскость движения (рис. 1 а). У агрегатов с тракторами , имеющими шарнирно-сочлененную раму , за центр агрегата принимается проекция на плоскость движения центра шарнира (рис. 1 б ). Для МТА с гусеничными тракторами центр агрегата соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных через наружные края гусениц (рис. 1 в ).
 Кинематической длиной агрегата l к называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении. Как видно из рис. 2 а, кинематическая длина l к агрегата складывается из кинематических длин lт трактора, l с сцепки и l м рабочей машины, т. е.
Кинематической длиной агрегата l к называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении. Как видно из рис. 2 а, кинематическая длина l к агрегата складывается из кинематических длин lт трактора, l с сцепки и l м рабочей машины, т. е.

 Длина выезда агрегата ( е ) определяется как расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) по ходу МТА перед началом и в конце поворота. Такое перемещение МТА необходимо для вывода рабочих органов последнего ряда машин на контрольную линию. По значению е пропорциональна кинематической длине агрегата, т. е.
Длина выезда агрегата ( е ) определяется как расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) по ходу МТА перед началом и в конце поворота. Такое перемещение МТА необходимо для вывода рабочих органов последнего ряда машин на контрольную линию. По значению е пропорциональна кинематической длине агрегата, т. е.
Значения а е для МТА соответствующих типов приведены в справочной литературе по машиноиспользованию.
Рис.2 — Основные кинематические характеристики агрегата
Кинематическая ширина агрегата d K равна расстоянию между проекциями на плоскость движения продольной оси трактора и параллельной линии, проходящей через наиболее удаленную точку агрегата . Различают d K вправо и влево от продольной оси трактора. Указанные расстояния используют при расчете ширины поворотной полосы загона.
Радиус поворота агрегата R (рис. 2 б ) определяется как расстояние от центра агрегата ц до центра поворота О . Обычно при повороте МТА центр агрегата ц перемещается не по окружности, а по дуге более сложной формы.
Соответственно изменяется как значение радиуса поворота R , так и расположение мгновенного центра поворота О на плоскости движения. При эксплуатационных расчетах принимают среднее значение радиуса поворота R с учетом возможной поправки на скорость МТА.
На рис. 2 а дополнительно показаны такие кинематические показатели агрегата, как ширина колеи k и продольная база Lт трактора, а также ширина захвата МТА. При кинематических расчетах значения рабочей В и конструктивной В к ширины захвата МТА принимают одинаковыми.
 Основные кинематические характеристики рабочего участка:
Основные кинематические характеристики рабочего участка:
— общая L и рабочая Lp длины гона;
— ширина Е поворотной полосы;
Под рабочим участком подразумевается часть поля, отведенная для выполнения определенной сельскохозяйственной операции. Загон представляет собой часть рабочего участка прямоугольной формы, отведенную для работы на ней одного или группы агрегатов.
Рис. 3. Основные кинематические характеристики рабочего участка
 Длина L гона часто определяется размерами поля, а ширина С загона — шириной В захвата и способом движения МТА. Ширина Е поворотной полосы зависит от ширины В захвата и условий безопасного поворота агрегата.
Длина L гона часто определяется размерами поля, а ширина С загона — шириной В захвата и способом движения МТА. Ширина Е поворотной полосы зависит от ширины В захвата и условий безопасного поворота агрегата.
Рабочая длина гона равна:
По соображениям удобства в последующем в качестве расчетной длины гона используется общая длина гона L .
Такое упрощение мало влияет на конечные результаты расчетов. От контрольных линий (рис. 3) в обе стороны на расстоянии длины е выезда агрегата прокладывают линии выключения и включения рабочих органов. Подготовка рабочего участка в полном соответствии с рисунком крайне важна для качественной, высокопроизводительной и экономичной работы машинно-тракторных агрегатов.
2. Виды поворотов.
Петлевые повороты применяются в том случае, если расстояние между смежными проходами агрегата меньше двух радиусов его поворота, т.е.
где Х – расстояние между смежными проходами агрегата;
R 0 – радиус поворота агрегата, м.
Рассмотрим беспетлевые повороты.
Безпетлевые повороты применяются в том случае, если расстояние между смежными проходами агрегата больше либо равно сумме двух радиусов его поворота, т.е.
где Х – расстояние между смежными проходами агрегата;
R 0 – радиус поворота агрегата, м.
Преимущества и недостатки:
1. Наличие петли той или иной формы удлиняет траекторию поворота, а в ряде случаев значительно увеличивает и ширину поворотной полосы (грушевидный, восьмёркообразный, петлевой с открытой петлёй).
2. Отсутствие петли той или иной формы сокращает длину беспетлевого поворота по сравнению с петлевым и значительно уменьшает ширину поворотной полосы (беспетлевой с прямолинейным участком, беспетлевой дугообразный).
3. Петлевые повороты с задним ходом применимы только для движения агрегатов с навесными машинами и хотя для них не требуется широкая поворотная полоса, время поворота t П увеличивается вследствие двух дополнительных остановок трактора для переключения движения с переднего хода движения на задний и наоборот.
Возможность применения того или иного вида поворота зависит от выполняемой операции, условий работы, типа агрегата (ширина захвата, прицепной или навесной, наличие оборотных рабочих органов, реверса и т.д.) и др. факторов.
Главное условие выбора поворота – улучшение качества и технико-эксплуатационных показателей работы агрегата.
3.Классификация способов движения агрегатов по схеме обработки участка. Графическая иллюстрация.
Основными способами движения агрегатов по схеме обработки участка являются следующие:
— с чередованием загонов всвал-вразвал;
Всвал (гоновое правоповоротное движение, при котором загон (участок) обрабатывают от средней части к боковым сторонам (при вспашке в средней части образуется свальный гребень). Применяется в основном на вспашке, уборке картофеля и свёклы.
Вразвал (гоновое левоповоротное движение, при котором загон обрабатывают от боковых сторон к средней части (при вспашке в средней части образуется развальная борозда). Применяется в основном на вспашке, уборке картофеля и свёклы

Беспетлевой комбинированный (движение на одном загоне осуществляется всвал и вразвал). Применяется на вспашке с целью уменьшения ширины поворотных полос, т.к. при этом способе все повороты – беспетлевые.
С чередованием загонов «всвал-вразвал» (нечётные загоны обрабатываются «всвал», т.е. от средней части к боковым сторонам (при вспашке в средней части образуется свальный гребень), а чётные – «вразвал», т.е. от боковых сторон к средней части (при вспашке в средней части образуется развальная борозда). Этот способ позволяет сократить число свальных гребней и развальных борозд по сравнению со способами «всвал» и «вразвал», поскольку на границах загонов направление рабочих ходов совпадает. Применяется в основном на вспашке лемешными плугами.
Перекрытием (движение на загоне осуществляется параллельными ходами с беспетлевыми поворотами). Применяется в основном при посеве на небольших участках с длиной гона до 200 м.
Челночный (загон обрабатывают последовательными, чаще всего рядом расположенными ходами с правыми и левыми поворотами). Это самый распространённый способ движения, не требующий тщательной подготовки поля к работе. Применяется на внесении удобрений, вспашке оборотными плугами, культивации, бороновании, посеве и посадке с.х. культур, уходе за растениями и уборке.
3.Закрепление нового материала по вопросам
4. Домашнее задание .Подведение итогов урока.
Источник



