
- 11. Метод замены плоскостей проекций (Дополнение)
- 16. Определение угла между прямой и плоскостью
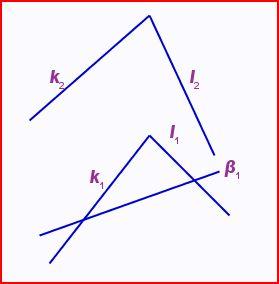
- 17. Определение угла между плоскостями
- 18. Кривые линии. Классификация кривых линий
- 19. Поверхность
- Способы преобразования чертежа: Способ замены плоскостей проекций, Способы вращения: Методические рекомендации для самостоятельной работы студентов , страница 2
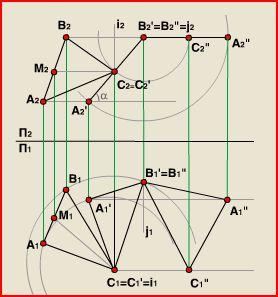
11. Метод замены плоскостей проекций (Дополнение)
проецирующей в плоскость уровня
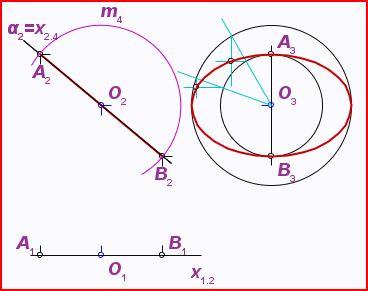
Алгоритм графических построений:
Проводим первую ось вращения i;
В треугольнике АВС проводим горизонталь C2M2 и находим ее проекцию на П1;
Поворачиваем A1B1C1 вокруг оси i до положения, при котором C1M1 будет перпендикулярен оси проекций П1П2;
A1’B1’C1′ — горизонтальная проекция после первого поворота;
Параллельно оси проекций проводим фронтальные проекции дуг, по которым двигаются точки А В С на П2. На чертеже это вспомогательные линии серого цвета;
Из A1’B1’C1′ проводим линии проекционной связи до пересечения с соответствующими проекциями дуг. A2’B2’C2′ — новая фронтальная проекция АВС после первого поворота. a — искомый угол наклона плоскости АВС к П1;
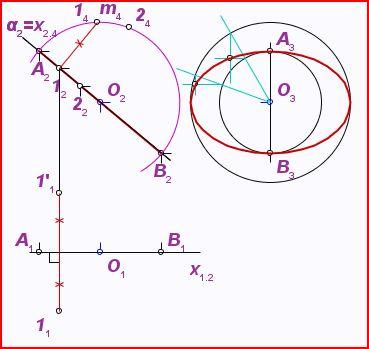
Проводим ось j через точку В’;
Поворачиваем A2’B2’C2′ до положения параллельного оси проекций. A2″B2″C2″ — фронтальная проекция АВС после второго поворота;
Параллельно оси проекций проводим горизонтальные проекции дуг, по которым двигаются точки А В С на П1. На чертеже это вспомогательные линии серого цвета;
Из A2″B2″C2″ проводим линии проекционной связи до пересечения с соответствующими проекциями дуг. A1″B1″C1″ — новая горизонтальная проекция треугольника АВС в натуральную величину после второго поворота.
16. Определение угла между прямой и плоскостью
Углом между прямой и плоскостью является линейный угол между пересекающимися прямыми, проведенными параллельно заданным. Задача 61













17. Определение угла между плоскостями
Углом между двумя плоскостями называется один из двух смежных двугранных углов между этими плоскостями. 














18. Кривые линии. Классификация кривых линий
Кривая линия — это множество точек пространства, координаты которых являются функциями одной переменной. Термин «кривая» в разных разделах математики определяется по-разному.
В начертательной геометрии кривую рассматривают как траекторию, описанную движущей точкой, как проекцию другой кривой, как линию пересечения двух поверхностей, как множество точек, обладающих каким-либо общим для всех их свойством и т.д.
Например, (рис.80) циклоида – траектория движения точки окружности, катящейся без скольжения по прямой линии. Эта кривая состоит их ряда «арок», каждая из которых соответствует полному обороту окружности.














19. Поверхность
Поверхность можно рассматривать, как совокупность последовательных положений l1,l2… линии l перемещающейся в пространстве по определенному закону (рис.93). В процессе образования поверхности линия l может оставаться неизменной или менять свою форму — изгибаться или деформироваться. Для наглядности изображения поверхности на эпюре Монжа закон перемещения линии l целесообразно задавать графически в одной линии или целого семейства линий (m, n, p. ). Подвижную линию принято называть образующей, неподвижные — направляющими. Такой способ образования поверхности принято называть кинематическим.
По виду образующей различают поверхности линейчатые и нелинейчатые, образующая первых – прямая линия, вторых – кривая.
Линейчатые поверхности в свою очередь разделяют на так называемые развертывающие, которые можно без складок и разрывов развернуть на плоскость и неразвертывающиеся.
Если же группировать поверхности по закону движения образующей линии и производящей поверхности, то большинство встречающихся в технике поверхностей можно разделить на:
· поверхности с плоскостью параллелизма;
· поверхности параллельного переноса.
Особое место занимают такие нелинейные поверхности, образование которых, не подчинено ни какому закону. Оптимальную форму таких поверхностей определяют теми физическими условиями, в которых они работают и устанавливают ее форму экспериментально (поверхности лопастей турбин, обшивка каркасов морских судов и самолетов).
Для графического изображения поверхности на чертеже используется её каркас.
Множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества, называется каркасом поверхности.
Поверхность может быть задана и конечным множеством точек, которое принято называть точечным каркасом.
Проекции каркаса могут быть построены, если задан определитель поверхности – совокупность условий, задающих поверхность в пространстве и на чертеже.
Различают две части определителя: геометрическую и алгоритмическую.
Геометрическая часть определителя представляет собой набор постоянных геометрических элементов (точек, прямых, плоскостей и т.п.), которые могут и не входить в состав поверхности.
Вторая часть – алгоритмическая (описательная) – содержит перечень операций, позволяющий реализовать переход от фигуры постоянных элементов к непрерывному каркасу.
Определитель кривой поверхности— направляющие и образующие.
Источник
Способы преобразования чертежа: Способ замены плоскостей проекций, Способы вращения: Методические рекомендации для самостоятельной работы студентов , страница 2
Часто для приведения прямой, плоской фигуры или пространственной формы в то частное положение, которое требуется для решения задачи, приходится заменять обе плоскости проекций. Переход от заданной системы плоскостей V/H к новой V1/H1 может быть осуществлен по одной из приведенных ниже схем:
На рисунке 12 задана точка A в системе V/H. Затем осуществлен переход от системы V/H к системе V1/H1: проведена новая ось проекций Х1, найдена новая проекция а’1 точки А. Далее система V1/H заменена новой системой плоскостей проекции V1/H1 —вместо горизонтальной плоскости проекций введена новая плоскость Н1.
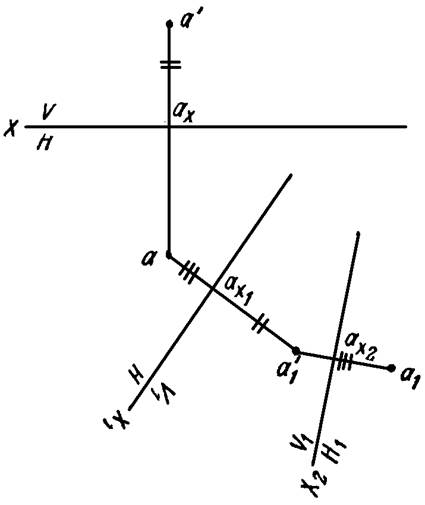
Положение новых осей проекций выбирается в соответствии с конкретными условиями задачи.
Пример 6. Определить истинную фигуру треугольника ABC (рисунок 13).
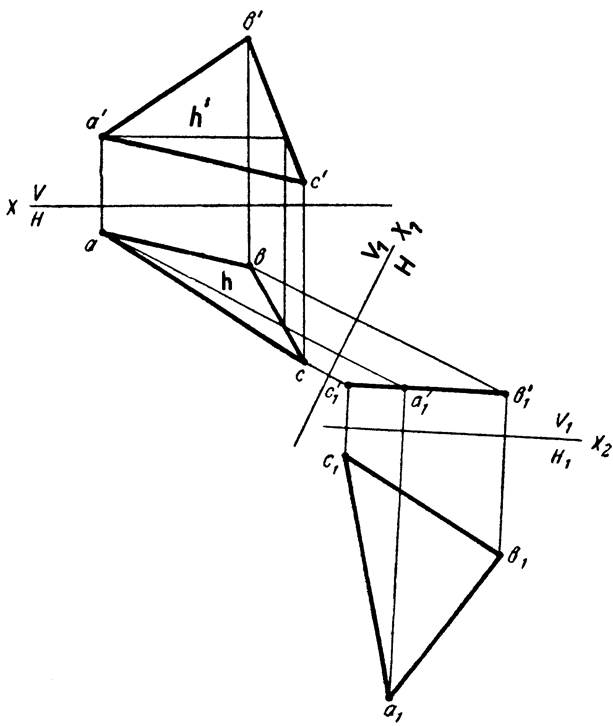
Треугольник спроектируется в натуральную величину на какую-либо плоскость проекций, если он окажется параллельным этой плоскости. Для того чтобы треугольник АВС оказался параллельным одной из плоскостей проекций, необходимо выполнить двойную замену плоскостей.
Сначала заменим плоскость V на плоскость V1. Плоскость V1 выберем перпендикулярно плоскости треугольника АВС — новая ось проекций x1должна быть перпендикулярна горизонтальной проекции горизонтали h. На новую фронтальную плоскость проекций треугольник cпроектируетcя в виде прямой линии c’1a’1b’1. Затем введем новую плоскость проекций H1 параллельно плоскости треугольника.
Горизонтальная проекция a1b1c1 треугольника ABC в новой системе — истинная величина его.
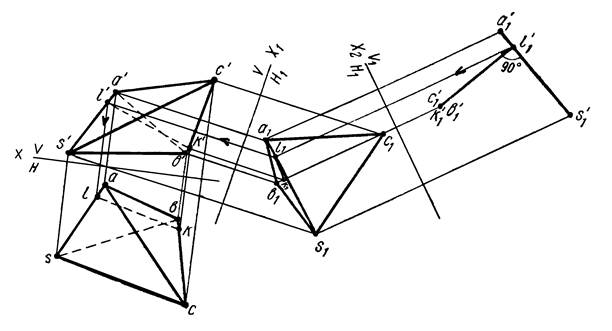
Пример 7. Дана пирамида SАВС (рисунок 14). Определить величину двугранного угла при ребре АВ.
Задача сводится к построению проекции данного угла на плоскость проекций, перпендикулярную к его ребру.
Так как ребро АВ — прямая общего положения, то необходимо произвести две последовательные замены плоскостей проекций. Плоскость V заменяем плоскостью V1, параллельной отрезку АВ.
Находим новую фронтальную проекцию s’1a’1b’1c’1 пирамиды SАВС на новой фронтальной плоскости проекций. Затем от системы V1/H перейдем к системе V1/H1. Плоскость H1 расположим перпендикулярно отрезку АВ. На плоскость Н1 ребро АВ спроектируется в точку, а грани SАВ и САВ — в прямые. Угол s1a1c1 будет искомым.
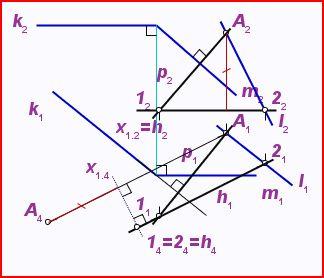
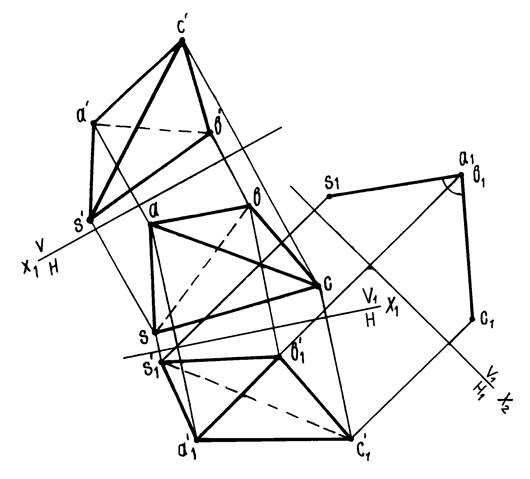
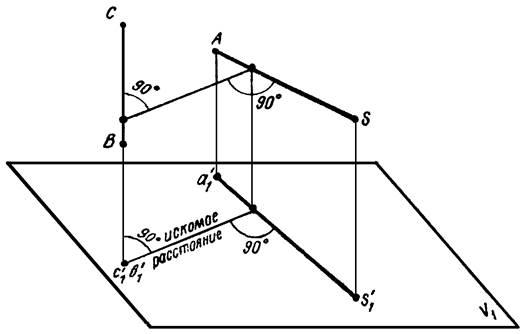
Пример 8. Дана пирамида SАВС (рисунок 15). Определить кратчайшее расстояние между ребрами SА и ВС.
Прямые SА и ВС являются скрещивающимися. Следовательно, задача сводится к определению кратчайшего расстояния между двумя скрещивающимися прямыми. Для решения задачи необходимо произвести такую замену плоскостей проекций, чтобы в новой системе одна из прямых, например ВС (рисунок 16), оказалась перпендикулярной к какой-либо плоскости проекций. Замену плоскостей проекций осуществляем по схеме V/H → V/H1 → V1/H1.
Следовательно, решение задач методами преобразования сводится к выполнению четырех основных этапов:
1) преобразование прямой общего положения в прямую уровня (определение углов наклона прямой к плоскостям проекций и натуральной величины отрезков);
2. преобразование прямой уровня в проецирующую прямую (определение величины двугранного угла, расстояния между прямыми);
3. преобразование плоскости общего положения в проецирующую плоскость (определение углов наклона плоскости к плоскостям проекций, расстояния от точки до плоскости);
4. преобразование плоскости проецирующей в плоскость уровня (определяется натуральная величина плоскости).
В системе V1H1 прямая ВС (см. рисунок 15) проектируется в точку. Отрезок k’1l’1 — кратчайшее расстояние между ребрами АS и ВС. Для построения проекций кратчайшего расстояния в системе V/H находим по линии связи точку l1 и проводим l1k1 параллельно оси проекций Х2 , после чего при помощи линий связи находим основные проекции kl и k’l’.
Сущность способов вращения заключается в том, что заданная геометрическая форма путем вращения вокруг некоторой оси перемещается в пространстве до тех пор, пока она не займет частное положение по отношению к неизменной системе плоскостей проекций.
В зависимости от положения оси вращения по отношению к плоскостям проекций различают следующие способы вращения:
а) вращение вокруг осей, перпендикулярных к плоскостям проекций;
б) то же без указания положения осей вращения;
в) вращение вокруг горизонтали или фронтали;
г) вращение вокруг одного из следов плоскости (совмещение).
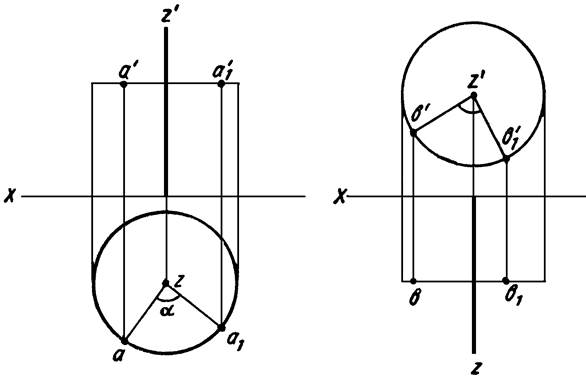
Рисунок 17 Рисунок 18
На эпюре (рисунок 17) изображена точка А и ось вращения Z, перпендикулярная к плоскости проекций H. При вращении вокруг оси Z точка А будет перемещаться по окружности, лежащей в плоскости, перпендикулярной оси вращения (параллельной плоскости проекций H). Если точку А переместить из положения А в положение A1 т. е. повернуть ее вокруг оси Z, на некоторый угол α , то ее горизонтальная проекция (а) займет положение a1, описав при этом дугу радиуса za (za — радиус вращения), а фронтальная проекция (а’) точки переместится по прямой a’a’1, параллельной оси X.
Если ось вращения Z (рисунок 18) перпендикулярна к плоскости проекций V, то при вращении точки В вокруг этой оси фронтальная проекция траектории её перемещения будет окружностью, а горизонтальная — прямой, параллельной оси X.
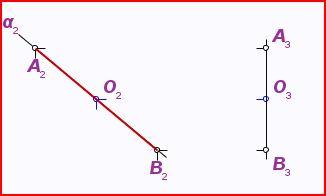
Пример 9. Совместить точку А с плоскостью Р путем вращения ее вокруг заданной оси Z (рисунок 19).
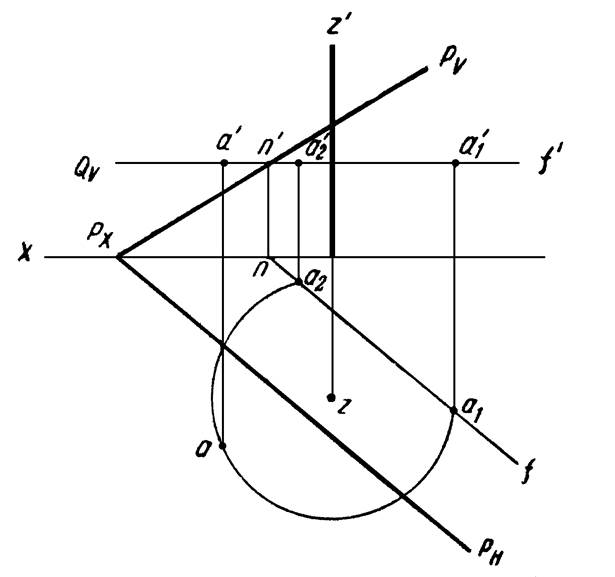
При вращении вокруг оси Z, точка А опишет окружность в плоскости Q, перпендикулярной этой оси. Плоскость Q пересечет заданную плоскость Р по горизонтали NF. Очевидно, точка А окажется в плоскости Р тогда, когда окружность, описываемая точкой А, пересечет горизонталь NF. Задача, как видно из чертежа, имеет два решения.
Чтобы повернуть прямую АВ (рисунок 20) на некоторый угол α, достаточно повернуть на заданный угол две принадлежащие, ей точки. Из чертежа видно, что треугольники abz и a1b1z1 равны между собой (по двум сторонам и углу между ними), а из их равенства следует, что ab = a1b1, т. е. величина горизонтальной проекции отрезка при вращении его вокруг оси, перпендикулярной Н, не изменяется, изменяется только ее положение относительно оси проекций. Это обстоятельство позволяет упростить построения при решении приведенного примера
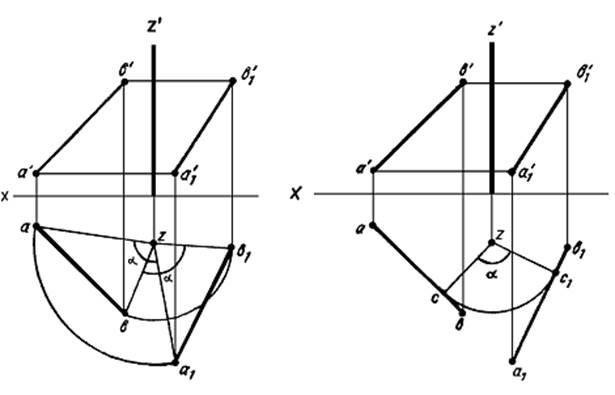
Рисунок 20 Рисунок 21
На рисунке 21 для поворота прямой АВ вокруг оси Z на угол α из z, опущен перпендикуляр на ab. Затем точка с повернута на заданный угол α, через точку c1 проведена прямая, перпендикулярная радиусу c1z, и отложены отрезки c1a1=са и c1b1=cb.
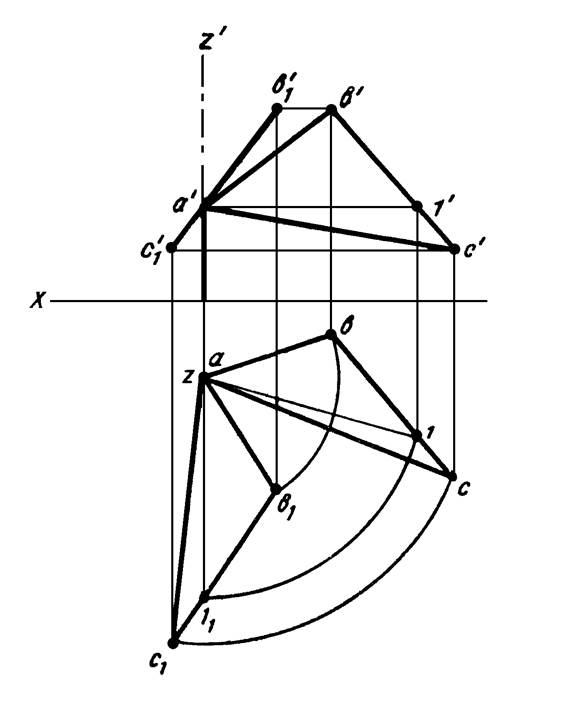
Вращение плоскости вокруг оси, перпендикулярной плоскости проекций, осуществляется путем вращения на один и тот же угол в одном и том же направлении точек и прямых, которыми задана плоскость.
На рисунке 22 плоскость, заданная треугольником АВС, повернута вокруг оси Z. в положение, перпендикулярное фронтальной плоскости проекций (горизонтальная проекция горизонтали А1 заняла положение, перпендикулярное оси X).
Если же плоскость задана следами, то для поворота плоскости на некоторый угол необходимо повернуть на заданный угол один из ее следов и горизонталь или фронталь этой плоскости (рисунок 23).
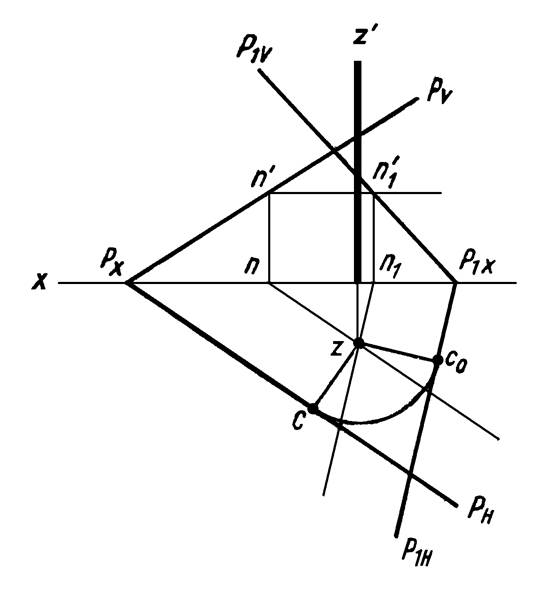
Таким образом, при вращении любой пространственной формы около оси, перпендикулярной одной из плоскостей проекций, проекция ее на эту плоскость по своей величине не изменится. Изменится лишь положение этой проекции относительно оси проекций. Пользуясь этим, для решения той или иной задачи можно применять способ вращения, не изображая на чертеже осей вращения.
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им. Даля 166
- ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им. Макарова 543
- НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им. Герцена 123
- РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им. Каразина 305
- ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Полный список ВУЗов
Чтобы распечатать файл, скачайте его (в формате Word).
Источник



