
- Как определить неприступное расстояние параллактическим способом
- Определение неприступных расстояний
- Определение недоступного расстояния электронным тахеометром Sokkia серии CX
- Измерение расстояний между точками
- Вычисление по введенным координатам
- Смена начальной точки
- Измерение неприступных расстояний
- Понятие о параллактическом методе измерения расстояний
Как определить неприступное расстояние параллактическим способом
Определение неприступных расстояний
В некоторых случаях, вследствие каких-либо препятствий, измерить линию продольного хода непосредственно лентой невозможно.
1 случай: (точка В недоступна для линейных измерений). По теореме синусов.
Разбиваем на местности ≈ равносторонний треугольник. Измеряем углы: β1, β2, β’1, β’2 и базисы b1, b2. Тогда неприступное расстояние АВ определяется по теореме синусов:
.jpg)
.jpg)
При заданной точности измерения базисов 1:2000, предельное расхождение между двумя определениями d не должно превышать 1:1000. За окончательное значение берется среднее из двух определений.
2 случай. По теореме косинусов:
Этот способ применяется, когда между точками A и В нет взаимной видимости. Разбиваем на местности примерно равнобедренные треугольники ABC и ABC1.
.jpg)
Расстояние определяется по теореме косинусов. Расстояние определяется дважды.
Расхождение между двумя определениями допускается – 1/1500. За окончательное значение берется среднее из двух определений.
Источник
Определение недоступного расстояния электронным тахеометром Sokkia серии CX
Недоступное (неприступное) расстояние – это расстояние до объекта, находящегося в поле зрения наблюдателя, которое не может быть измерено непосредственно.
Метод определения недоступного расстояния используется в тех случаях, когда надо измерить наклонное расстояние, горизонтальное проложение и разность высот между начальной точкой и любыми другими точками без перемещения инструмента.
Последняя измеренная точка может быть задана, как начальная для последующих измерений.
Результат измерений может быть выведен как градиент (уклон в %) между двумя точками.
Измерение расстояний между точками
Расстояние между двумя и более точками можно определить наблюдением визирных целей или вычислением по введенным координатам. Комбинация данных способов также возможна (например, наблюдение одной цели и ввод координат второй цели).
Определение с помощью наблюдения
1. На 3-й странице режима измерений нажмите [ОНР] и выберите «Опред-е HP».
2. Наведитесь на отражатель, установленный на начальной точке (ТЧК1) и нажмите [ИЗМЕР].
Если уже имеются результаты измерения расстояния, последнее значение берется в качестве начальной точки, и выводится экран, показанный на шаге 3.
Если инструмент находится вне диапазона работы компенсатора, выводится соответствующий экран. Приведите инструмент к горизонту.
3. Наведитесь на 2-й отражатель и нажмите клавишу [ОНР], чтобы начать измерения.
[ЗАП]: запись результата измерения первой цели.
На экране отображаются:
S : Наклонное расстояние между начальной и 2-й точками.
D : Горизонтальное проложение между начальной и 2-й точкой,
h : Превышение между начальной и второй точками.
Можно ввести высоту отражателя на начальной и 2-й точках. Нажмите [Выс_Ц] на 2-й стр.
Введите высоты отражателей и нажмите клавишу [ДА].
Нажмите [КООРД], чтобы ввести координаты.
При нажатии [ЗАП] отображается экран, показанный снизу.
Для сохранения результатов измерения на 2-й отражатель нажмите клавишу <Д А>.
Нажмите [ДА] для сохранения результатов определения недоступного расстояния и возврата к экрану с результатами измерений.
Для продолжения измерения без сохранения результатов измерения на 2-й отражатель или результатов определения недоступного расстояния нажмите
Результаты измерения недоступного расстояния нельзя сохранить, если отсутствуют имена точек, на которых установлены 1-й и/или 2-й отражатели. Введите имена точек.
4. Наведитесь на следующий отражатель и нажмите [ОНР], чтобы начать измерения. Таким способом можно определить наклонное расстояние, горизонтальное проложение и превышение между начальной точкой и несколькими отражателями. При нажатии клавиши [S/%] расстояние (S) между двумя точками выводится как градиент.
Для выполнения повторного наблюдения на начальную точку нажмите [ИЗМЕР]. Наведитесь на начальную точку и нажмите [ИЗМЕР].
При нажатии клавиши [СМЕНА] последняя измеренная точка становится новой начальной точкой при определении недоступного расстояния до следующего отражателя. «Смена начальной точки»
5. Для выхода из режима определения недоступного расстояния нажмите клавишу
Вычисление по введенным координатам
1. На 3-й странице режима измерений нажмите [ОНР] и выберите «Опред-е HP».
2. На 2-й странице нажмите клавишу [КООРД].
3. Введите координаты 1-го отражателя и нажмите [ДА].
Если нужно считать координаты из памяти, нажмите [СЧИТ].
Ввод данных о станции и дирекционного угла «Считывание координат из памяти»
4. Выберите «ТЧК2» и нажмите (ENT) для ввода координат 2-го отражателя.
5. Введите координаты 2-го отражателя и нажмите [ДА]. На экране отображаются значения:
S : Наклонное расстояние между начальной и 2-й точками.
D : Горизонтальное проложение между начальной и второй точками,
h : Превышение между начальной и второй точками.
Можно ввести высоту отражателя на начальной и 2-й точках. На 2-й странице нажмите клавишу [Выс_Ц]. Введите высоты отражателей и нажмите клавишу [ДА].
Нажмите клавишу [КООРД] для повторного ввода координат 1 -го и 2-го отражателей.
При нажатии клавиши [ЗАП] на экране отображаются результаты определения недоступного расстояния. Нажмите [ДА], чтобы сохранить результаты измерений.
При нажатии клавиши [S/%] расстояние (S) между двумя точками выводится как градиент.
Нажмите клавишу [ИЗМЕР], чтобы выполнить наблюдение на начальную точку. «Определение с помощью наблюдения»
При нажатии клавиши [СМЕНА] последняя измеренная точка становится новой начальной точкой при определении недоступного расстояния до следующего отражателя. «Смена начальной точки»
6. Для выхода из режима определения недоступного расстояния нажмите клавишу
Результаты измерения недоступного расстояния нельзя сохранить, если отсутствуют имена точек, на которых установлены 1-й и/или 2-й отражатели. Всегда вводите имена точек, на которых установлены отражатели.
Смена начальной точки
Последняя измеренная точка может быть задана, как начальная для последующих измерений.
1. Наблюдайте начальную точку и отражатель в соответствии с действиями, описанными в предыдущем разделе. «Измерение расстояний между точками»
2. После измерения визирных целей нажмите клавишу [СМЕНА], затем клавишу [ДА].
Для отмены измерения нажмите клавишу [НЕТ].
Последняя измеренная точка становится новой начальной точкой.
Выполните процедуру определения недоступного расстояния.
Источник
Измерение неприступных расстояний




![]()
![]()
При выполнении измерительных работ нередко возникают ситуации, когда та или иная линия не может быть измерена непосредственно, например, рулеткой (водные преграды, непроходимые болота и т.д.).
Определение неприступных расстояний способом базисов (рис. 52).
На удобных участках местности для производства линейных измерений с использованием рулетки от точки А измеряемой линии строят два базиса b и b1 таким образом, чтобы между ними и измеряемой прямой линией образовались два треугольника с углами при основании не менее 30° и не более 150°. Базисы измеряют рулеткой дважды и при допустимых расхождениях в промерах определяют среднее значение каждого из них. Полным приемом теодолита измеряют углы при основаниях полученных треугольников АВС1 и АВС, соответственно α1, β1 и α, β. По теореме синусов дважды определяют значение искомого неприступного расстояния:
АВ = b · ( sin β : sin γ ) или АВ’ = b1 · ( sin β1 : sin γ1 ),
Если относительная погрешность между двумя измерениями не превышает допустимой (АВ — АВ’) : АВср ≤ 1/ Nдоп, то окончательно принимают в качестве искомого результата среднее значение АВ = (АВ + АВ’) : 2
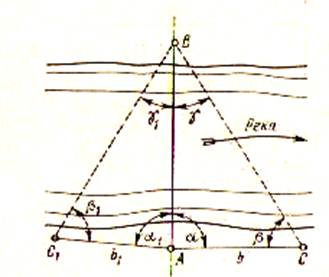
Рис. 52. Схема определения неприступного расстояния способом базисов
Например: Вычислить непреступное расстояние АВ (ширину реки по результатам измерения):
b = 157, 30 м, α = 51°17′, β = 70°04′,
Найдем величину углов γ и γ1.
γ = 180° — ( 51°17′ + 70°04′) = 58°39′,
γ1 = 180° — ( 52°50’30′′ + 70°08′) = 57°01’30′′.
Неприступное расстояние АВ вычислим по теореме синусов
АВ = b · ( sin β : sin γ ) или АВ’ = b1 · ( sin β1 : sin γ1 ),
АВ = 157,30 · (sin 70°04′ : sin 58°39′) = 173,16 м,
АВ’ = 154,40 ( sin 70°08′ : sin 57°01’30′′ ) = 173,09м.
Относительную погрешность двух измерений определяют
(АВ — АВ’) : АВср = (173,16 – 173,09) : 173,125 = 0,07 : 173,125 = 1 : 2500,
Источник
Понятие о параллактическом методе измерения расстояний
Под параллактическим методом понимается косвенный метод определения расстояний с помощью малого базиса, разбиваемого поперек измеряемой линии, и параллактических углов, под которыми базис рассматривается из концов линии. Параллактический метод используется в случаях, когда непосредственное измерение расстояний мерными приборами невозможно из-за наличия в створе измеряемых линий различного рода препятствий либо затруднительно ввиду сильно пересеченной местности. Геометрическая фигура, образованная измеряемой линией с базисом связывающим их построением, называется параллактическим звеном. Наиболее широкое распространение в геодезической практике получили два типа параллактических звеньев:
Звено треугольной формы с коротким базисом, расположенным в конце линии под углом 90 0 (рис. 10.3 а).
Симметричное звено ромбической формы с коротким базисом, расположенным под углом 90 0 к линии хода вблизи ее середины (рис. 10.3 б); схема такого звена обеспечивает наибольшую точность.
Рисунок 10 3 – Параллактический метод определения расстояний
10.3 Оптические дальномеры
Оптические дальномеры – это геодезические приборы, позволяющие определять горизонтальные и наклонные расстояния косвенным методом. В общем виде теория оптического дальномера сводится к решению равнобедренного треугольника, в котором по малому (параллактическому) углу и противолежащей ему стороне (базису) вычисляют расстояние D.
D =  b∙ctg
b∙ctg  .
.
Поскольку угол b мал (менее 1 0 ), то функцию tg можно заменить значением аргумента , выраженным в радианной мере. Тогда:

Конструкциями оптических дальномеров предусматривается, что одна из величин (угол b или база b) является постоянной, а вторая — переменной величиной, подлежащей измерению. В зависимости от этого различают два типа оптических дальномеров.
10.3.1 Дальномеры с постоянным параллактическим углом. При работе с такими дальномерами измеряют переменную величину l с помощью дальномерной рейки, устанавливаемой в конечной точке измеряемой линии. Обозначив в формуле постоянную величину r/b через К, получим:
где К – коэффициент дальномера.
Наиболее распространенным оптическим дальномером является нитяной дальномер с постоянным параллактическим углом. Он состоит из двух горизонтальных нитей, параллельных средней горизонтальной нити сетки трубы теодолита или нивелира. В комплект нитяного дальномера входит вертикальная рейка с делениями. Для измерения линии на одном её конце ставят инструмент, а на другом – отвесно рейку. Коэффициент нитяного дальномера равен 100.
К достоинствам нитяного дальномера относится простота устройства и удобство применения, к недостаткам – сравнительно низкая точность измерения расстояний, равная  Последнее обусловлено влиянием на результаты измерений неблагоприятных внешних условий, неточности отсчитывания по рейке, большой толщины нитей, неточности коэффициента дальномера и делений рейки и т.п.
Последнее обусловлено влиянием на результаты измерений неблагоприятных внешних условий, неточности отсчитывания по рейке, большой толщины нитей, неточности коэффициента дальномера и делений рейки и т.п.
10.3.2 Дальномеры с постоянной базой. При работе с дальномерами данного типа измеряют угол b; постоянная база b закрепляется на дальномерной рейке специальными марками. В этом случае искомое расстояние определится по формуле:

где К = b∙r — коэффициент дальномера.
Во всех случаях дальномерная рейка может занимать как горизонтальное, так и вертикальное положение.
10.3.3 Дальномеры двойного изображения в значительной мере свободны от недостатков, присущих нитяному дальномеру, и позволяют получать результаты с точностью, близкой к точности измерения расстояний мерными лентами. В основу этих дальномеров положено свойство стеклянной призмы отклонять проходящие через нее лучи к основанию. Призма с очень малым преломляющим углом называется оптическим клином. Дальномеры двойного изображения изготавливаются в двух видах:
— дальномеры с постоянным параллактическим углом и переменной базой, в которых используется оптический клин;
— дальномеры с постоянной базой и переменным углом, в котором используются линзы либо их системы.
Источник



