
Методы управления двигателем постоянного тока в САУ
Управление двигателем постоянного тока в САУ подразумевает либо изменение скорости вращения пропорционально некоторому сигналу управления, либо поддержание этой скорости неизменной при воздействии внешних дестабилизирующих факторов.
Используются 4 основные метода управления, реализующие перечисление выше принципы:
управление по системе «генератор-двигатель» (Г-Д);
управление по системе «управляемый выпрямитель –Д» (УВ-Д);
Подробное исследование этих способов – предмет ТАУ и курса «Основы электропривода». Мы рассмотрим только основные положения, имеющие непосредственное отношение к электромеханике.

Обычно используются 3 схемы:
при регулировке скорости n от 0 до nном в цепь якоря включают реостат (якорное управление);
при необходимости получить n > nном реостат включают в цепь ОВ (полюсное управление);
для регулирования скорости n nном реостаты включают как в цепь якоря, так и в цепь ОВ.
Перечисленные схемы применяются при ручном управлении. Для автоматического управления используют ступенчатое переключение R ра и R рв с помощью контакторов (реле, электронных коммутаторов).
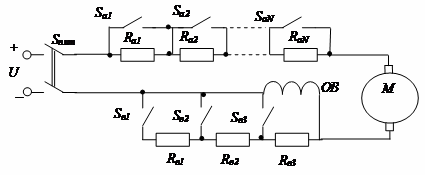
Если требуется точное и плавное регулирование скорости, число коммутируемых резисторов и элементов коммутации должно быть большим, из-за чего увеличиваются габариты системы, стоимость и снижается надежность.
Управление по системе Г-Д
Регулирование частоты вращения от 0 до по схеме рис. производится регулировкой R в (U гизменяется от 0 до n ном). Для получения скорости двигателя больше nном — изменением R вд (уменьшение тока ОВ двигателя уменьшает его основной поток Ф, что и приводит к увеличению скорости n).
Переключатель S1 предназначен для реверса двигателя (изменения направления вращения его ротора).
Поскольку управление Д осуществляется путем регулирования сравнительно малых токов возбуждения Г и Д, оно легко адаптируется к задачам САУ.
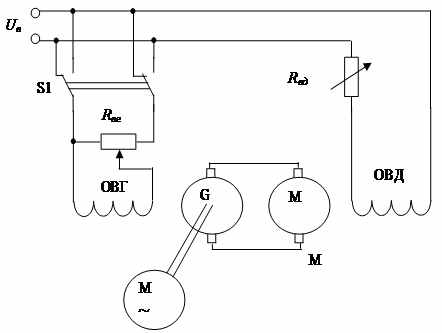
Недостаток такой схемы – большие габариты системы, масса, низкий КПД, поскольку здесь имеется трехкратное преобразование преобразование энергии (электрической в механическую и обратно, и на каждом этапе имеются потери энергии).
Управление по системе «управляемый выпрямитель – двигатель»
Система «управляемый выпрямитель – двигатель» (см. рисунок) похожа на предыдущую, но вместо электромашинного источника регулируемого напряжения, состоящего из, например, трехфазного, двигателя переменного тока и Г=Т, используется управляемый, например, тоже трехфазный тиристорный электронный выпрямитель.
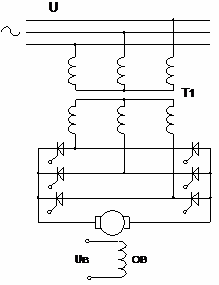
Сигналы управления формируются отдельным блоком управления и обеспечивают требуемый угол открывания тиристоров, пропорциональный сигналу управления Uу.
Достоинства такой системы — высокий КПД, малые габариты и масса.
Недостатком по сравнению с предыдущей схемой (Г-Д) является ухудшение условий коммутации Д из-за пульсаций его тока якоря, особенно при питании от однофазной сети.
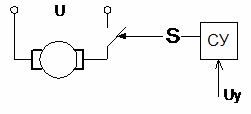
На двигатель с помощью импульсного прерывателя подаются импульсы напряжения, модулированные (ШИМ, ВИМ) в соответствии с управляющим напряжением.
Таким образом, изменение скорости вращения якоря достигается не за счет изменения напряжения управления, а путем изменения времени, в течение которого к двигателю подводится номинальное напряжение. Очевидно, что работа двигателя состоит из чередующихся периодов разгона и торможения (см. рисунок).
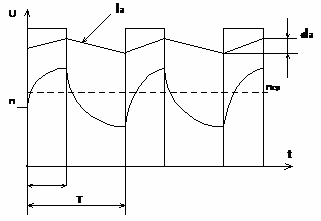
Если эти периоды малы по сравнению с полным временем разгона и остановки якоря, то скорость n не успевает к концу каждого периода достигать установившихся значений nном при разгоне или n = 0 при торможении, и устанавливается некоторая средняя скорость nср, величина которой определяется относительной продолжительностью включения.
Поэтому в САУ требуется схема управления, назначение которой – преобразование постоянного или изменяющегося сигнала управления в последовательность управляющих импульсов с относительной продолжительностью включения, являющейся заданной функцией величины этого сигнала. В качестве элементов коммутации используются силовые полупроводниковые приборы – полевые и биполярные транзисторы, тиристоры.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Исполнительные двигатели постоянного тока способы управления

Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление.
§ 2.1 Якорное управление исполнительным двигателем

Рис. 2.1. Схема включения исполнительного двигателя при якорном управлении
Схема включения двигателя с якорным управлением показана на рис. 2.1. Напряжение возбуждения подается на обмотку полюсов, напряжение управления — на обмотку якоря. Коэффициент сигнала a здесь равен a = Uу/Uв. Для двигателей с постоянными магнитами a = Uу/Uу.ном. Регулирование частоты вращения осуществляется изменением напряжения управления.
При отсутствии насыщения Фв= kфUв, а поскольку Uв = const, магнитный поток возбуждения также остается постоянным, т.е. Фв = const.

Вращающий момент двигателя

Выразим момент в относительных единицах, приняв за базовый момент пусковой момент, развиваемый двигателем при n = 0 и a = 1

Тогда относительное значение момента m = M/Mб
 (2.1)
(2.1)
Частота вращения при холостом ходе (m = 0 и a = 1)
 (2.2)
(2.2)
Откуда находим cеkф= 1/nо. Подставляя это значение в (2.1), получим
 | (2.3) |
где n = n/nо— относительная частота вращения двигателя.
 (2.4)
(2.4)
Уравнение (2.3) есть уравнение механической характеристики исполнительного двигателя при якорном управлении. Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх = mn = n(a — n). Угловую скорость, при которой наступает максимум мощности, найдем известным приемом (dpмх/dn = 0), откуда nм= a/2, а максимальное значение механической мощности будет

 Мощность управления
Мощность управления
Приняв за базовую единицу мощность управления при коротком замыкании Ру.к (n = О, a = 1)

 получим мощность управления в относительных единицах
получим мощность управления в относительных единицах

На рис. 2.2,а представлены механические, на рис. 2.2,б — регулировочные характеристики, а на рис. 2.3 показана зависимость рмх = f(n) исполнительного двигателя. Проанализируем свойства двигателя при якорном способе управления.
Механические характеристикилинейные и параллельные, что означает независимость быстродействия от коэффициента сигнала. Пусковой момент и угловая скорость холостого хода пропорциональны коэффициенту сигнала.

Рис.2.2. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при якорном управлении

Рис. 2.3. Зависимость механической мощности от скорости вращения при якорном управлении
Регулировочные характеристикилинейные. Напряжение трогания пропорционально моменту нагрузки. Линейность механических и регулировочных характеристик является важным достоинством якорного управления.
Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока.
В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей.
Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же — она небольшая по величине, что также характерно для машин постоянного тока.
Максимум механической мощности в сильной степени зависит от коэффициента сигнала и даже при a = 1 не превышает 1/4 базовой мощности.
§ 2.3. Полюсное управление исполнительным двигателем

Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении
Схема управления приведена на рис.2.4 Напряжение управления подается на обмотку главных полюсов, напряжение возбуждения — на обмотку якоря, по которой в течение всего времени работы двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для его ограничения включают дополнительное сопротивление Rд.
Если пренебречь насыщением магнитной цепь, можно считать Ф = kфUу = kфaUв. Тогда ток якоря


Принимая за базовый момент пусковой (n = 0, a =1))

получим относительное значение момента

 С учетом (2.2) уравнение механической характеристики примет вид
С учетом (2.2) уравнение механической характеристики примет вид
Решив его относительно n, получим уравнение регулировочной характеристики

Механическая мощность в относительных единицах рмх= mn = an — a 2 n 2 . Скорость, при которой наступает максимум мощности nм = 0,5/a. Тогда максимальная механическая мощность будет


 Мощность возбуждения рв = UвIв. Подставляя значение тока, получим
Мощность возбуждения рв = UвIв. Подставляя значение тока, получим

На рис. 2.5,а представлены механические, на рис. 2.5,б — регулировочные характеристики, а на рис. 2.6 показана зависимость рмх = f(n) исполнительного двигателя при полюсном управлении.

Рис.2.5. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при полюсном управлении
Проанализируем эти графики.
Механические характеристики линейные, но непараллельные, к тому же и неоднозначные (одну и ту же частоту вращения можно получить при разных значениях a). Пусковой момент прямо-, а частота вращения холостого хода обратно пропорциональны коэффициенту сигнала и при малых a может существенно превышать номинальную, что безусловно опасно для двигателя.
Регулировочные характеристикинелинейные, а при m 0,5.
Мощность управления пропорциональна квадрату коэффициента сигнала и не зависит от частоты вращения. Она значительно меньше, чем при якорном управлении, что является достоинством данного способа.
Мощность возбужденияс увеличением частоты вращения уменьшается и тем быстрее, чем больше a.
Максимум механической мощности не зависит от коэффициента сигнала, что также можно отнести к достоинствам полюсного управления.
Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения.
Источник



