
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
3.10. Импульсный способ регулирования координат
Импульсный способ регулирования координат электропривода связан с периодическим импульсным изменением параметров каких-либо элементов электрических цепей ДПТ. (например, резисторов) или подводимого к ДПТ напряжения. Способы импульсного регулирования повторяют основные способы регулирования координат ДПТ независимого возбуждения и связаны с импульсным изменением сопротивления добавочного резистора в цепи якоря, магнитного потока и подводимого к якорю напряжения. Импульсный способ реализуется как в разомкнутой, так и в замкнутой системах электропривода.
Импульсное регулирование сопротивления добавочного резистора Rдв цепи якоря осуществляется в схеме рис. 3.36,апутем периодической коммутации (замыкания и размыкания) по определенному закону ключаК.
Существуют два основных способа управления ключом K– широтно-импульсное и частотно-импульсное. При широтно-импульсном управлении период коммутации ключаTк, состоящий из времени замкнутогоtзи разомкнутогоtpсостояний ключа, остается постоянным, а изменяется отношение времени замкнутого состояния ключаtзк периодуTк. Это отношение называется скважностью и обозначается буквой

т. е. при широтно-импульсном управлении изменяется время замкнутого состояния ключа tзпри неизменном периоде.

При частотно-импульсном управлении время tзостается неизменным, меняется период коммутации ключаТк, а также и ее частота. Заметим, что и при таком способе управления меняется скважность у. Таким образом, скважность оказывается универсальным показателем для обоих способов управления и им удобно пользоваться при анализе импульсных способов регулирования координат.
Семейство механических характеристик ДПТ независимого возбуждения при импульсном регулировании получим методом предельных (граничных) характеристик, проанализировав для этого граничные режимы работы ключа К: его постоянно разомкнутое и постоянно замкнутое состояния. По схеме рис. 3.36,авидно, что при замкнутом ключеК (=1) резисторRдвыведенRдиз цепи якоря и ДПТ в соответствии с этим имеет естественную механическую характеристику (прямая1на рис. 3.36,б). При разомкнутом ключеК (=0) резисторRдполностью введен и ДПТ имеет уже искусственную, реостатную характеристику (прямая2на рис. 3.36,б). При работе ключа с промежуточными значениями скважности (0 10 / 20 10 11 12 13 14 15 16 17 18 > Следующая > >>
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Регулирование координат электропривода с асинхронным двигателем изменением частоты напряжения.
Данный способ, называемый иногда частотным, широко используется для качественного регулирования в первую очередь скорости АД и широко применяется в настоящее время. Принцип его заключается том, что изменяя частоту f1 питающего АД напряжения, можно в соответствии с выражением
изменять его скорость ω0, получая различные искусственные характеристики.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а получаемые при этом характеристики обладают высокой жесткостью.
Частотный способ к тому же отличается и еще одним весьма важным свойством: регулирование скорости АД в этом случае не сопровождается увеличением его скольжения, поэтому потери мощности оказываются небольшими.
Необходимым элементом ЭП является преобразователь частоты, на вход которого подается стандартное напряжение сети U1 (220, 380 В и т.д.) промышленной частоты
f1 = 50 Гц, а с выхода снимается переменное напряжение U1 рег , регулируемой частоты f 1 рег .. Регулирование выходной частоты осуществляется с помощью управляющего сигнала Uу , который задает требуемое значение скорости двигателя 2.
Анализ механических характеристик двигателя показывает, что скорость идеального холостого хода двигателя изменяется пропорционально частоте напряжения, а критический момент Мк остается неизменным
Механические характеристики (см. рис. 13.4.) при частотном регулировании разделяются на характеристики, соответствующие частотам
· ниже номинальной (сетевой) f1ном.
· выше номинальной (сетевой) f1ном.
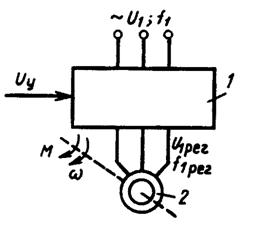
Рис.13.3. Схема управления изменением частоты напряжения, подводимого к статору асинхронного двигателя.
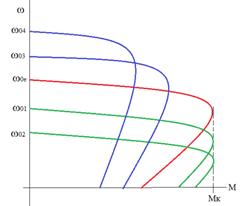
Рис.13.4. Семейство механических характеристик при изменении частоты напряжения статора
Область частот f1
Двигатель 1питается от сети со стандартной частотой f1 = 50 Гц, а на выводах синхронного генератора 4 частота и напряжение могут регулироваться. С помощью резистора R1 в цепи обмотки возбуждения генератора 2изменяется напряжение, подводимое к якорю двигателя 3, и тем самым его скорость и скорость генератора 4.
При этом меняется частота напряжения на выводах синхронного генератора 4, определяемая выражением  , а значит, и на двигателях 5. 7.
, а значит, и на двигателях 5. 7.
Напряжение на этих двигателях регулируется с помощью резистора R3, включенного в цепь обмотки возбуждения синхронного генератора 4.
Применение ПЧ позволяет плавно регулировать скорость двигателей 5. 7 в широком диапазоне.
Однако процесс регулирования частоты в электромашинном ПЧ имеет существенные недостатки:
· Для создания такого преобразователя необходимы четыре электрические машины, рассчитанные на полную мощность потребителей (группы АД), что определяет его громоздкость и высокую цену, особенно при больших мощностях нагрузки.
· Двойное преобразование энергии — энергии переменного тока с частотой f1 = 50 Гц в энергию постоянного тока и затем опять в энергию переменного тока регулируемой частоты — сопровождается потерей энергии во всей цепи, определяя невысокий КПД системы.
· Коллекторные машины постоянного тока требуют непрерывного надзора и ухода при эксплуатации, а их работа сопровождается шумом.
· Процесс изменения частоты в электромашинном ПЧ инерционен, что объясняется механической инерцией электромашинного агрегата.
б) Статические ПЧ,названные так потому, что в них используются не имеющие движущихся частей элементы и устройства.
Существует два основных типа статических преобразователей частоты:
- с непосредственной связью
- с промежуточным контуром постоянного тока.
В первом случае выходное напряжение синусоидальной формы формируется из кусочков ( участков) синусоид преобразуемого входного напряжения. При этом максимальное значение выходной частоты принципиально не может быть равным частоте питающей сети. Частота на выходе преобразователя этого типа обычно лежит в диапазоне от 0 до 25-33 Гц.
Наибольшее распространение получили преобразователи частоты с промежуточным контуром постоянного тока, выполненные на базе инверторов напряжения.
Рис.13.5. Типовая схема преобразователя частоты
- сеть переменного тока
- неуправляемый выпрямитель В
- конденсатор LC-фильтра
- автономный инвертор напряжения И с широтно-импульсной модуляцией (ШИМ)
- асинхронный двигатель АД, к которому приложено переменное 3-фазное напряжение с регулируемой частотой f = var и амплитудой U = var ;
- управление инвертором осуществляется блоком управления БУ.
Звено постоянного токасостоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока (+, -).
Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей соединенных по схеме приведенной ниже.
Каждая обмотка двигателя подсоединяется через соответствующий ключ к положительному и отрицательному полюсу звена постоянного тока.
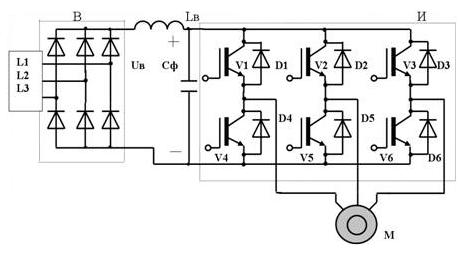
Рис.13.6. Силовой трехфазный импульсный инвертор
Система управления осуществляет управление силовым инвертором.
С помощью ключевых схем можно осуществить преобразование постоянного напряжение в синусоидальное напряжение переменной частоты и амплитуды.
Непосредственно, приложить синусоидальное напряжение переменной частоты и амплитуды к обмоткам двигателя данная схема не позволяет, но она позволяет, используя Широтно-Импульсную Модуляцию (сокращенно ШИМ), импульсно прикладывать к обмоткам двигателя напряжение звена постоянного тока, таким образом, что эффект оказывается практически эквивалентен, приложению синусоидального напряжения, требуемой частоты и амплитуды.
в) Принцип работы широтно-импульсной модуляции
Идею автономного инвертора напряжения (АИН) проиллюстрируем на простейшей однофазной схеме с четырьмя идеальными ключами 1, 2, 3, 4 и активной нагрузкой R – (см.рис.13 7.)
При попарной коммутации ключей 1,2 – 3,4 – 1,2 и т.д. через время Т/2 (рис,б) к резистору будет прикладываться переменное напряжение uab прямоугольной формы с частотой  . Ток при активной нагрузке будет повторять форму напряжения. Изменяя коммутационный промежуток Т/2, можно менять частоту в любых пределах.
. Ток при активной нагрузке будет повторять форму напряжения. Изменяя коммутационный промежуток Т/2, можно менять частоту в любых пределах.
 |  |
| а) | б) |
Рис. 13.7. Однофазный инвертор, нагруженный активным сопротивлением (а),
и диаграмма работы (б)
Таким образом, постоянное напряжение на входе инвертора с помощью электронных переключателей мы превратили в прямоугольное напряжение различной полярности.
Однако, для нормальной работы регулируемого асинхронного привода необходимо синусоидальное напряжение, частоту которого можно изменять по заданной программе.
Можно ли сформировать последовательность прямоугольных импульсов, полученных путем включения и отключения электронных ключей, в синусоидальный сигнал?
Да, можно. Для этого используют широтно-импульсную модуляцию.
Последовательность прямоугольных импульсов характеризуется скважностью, то есть отношением длительности импульса к периоду его следования

Рис.13.8. Прямоугольные импульсы различной скважности
Из графиков видно, что чем больше скважность, тем больше переданная электрическая энергия. Если цепь с последовательностью импульсов через интегрирующую цепочку (RC или LC) подсоединить к вольтметру, то можно заметить, что напряжение на приборе тем выше, чем больше скважность импульсов. Так как период следования импульсов все время одинаков, то можно сказать, что напряжение на вольтметре прямо пропорционально ширине прямоугольного импульса
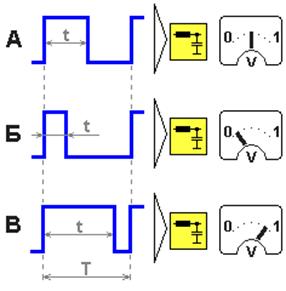
Рис.13.9. Зависимость величины напряжения на приборе от скважности импульсов.
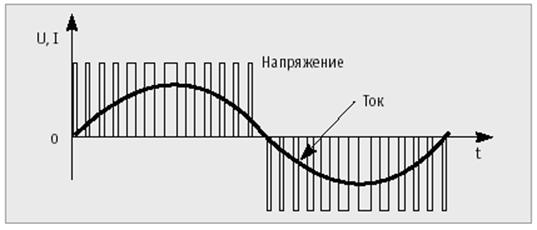
Таким образом, если транзисторные ключи инвертора включать в определенной последовательности и открывать их на определенное время, то можно на выходе инвертора (см.рис. 13.6.) получить синусоидальный сигнал.
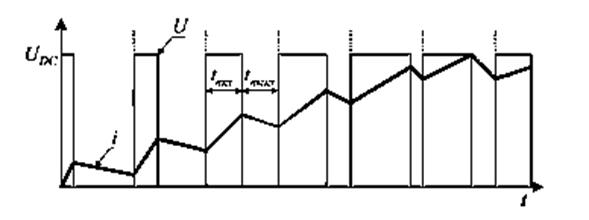
Широтно-импульная модуляция — это процесс формирования импульсов из постоянного напряжения, причем ширина импульсов изменяется по определенному закону.
Это означает, что ширина каждого импульса в последовательности будет определяться уровнем управляющего сигнала в данный момент времени. Таким управляющим сигналом обычно служит сигнал с системы управления асинхронным приводом.
Если такую последовательность импульсов напряжения по всем трем фазам послать на асинхронный двигатель, то ток в обмотках двигателя будет изменяться по синусоидальному закону. Изменяя период следования импульсов можно изменять частоту синусоидального сигнала и, следовательно, частоту вращения электропривода.
Дата добавления: 2018-05-12 ; просмотров: 1529 ; Мы поможем в написании вашей работы!
Источник



