
Способы возбуждения машин постоянного тока и их классификация
 Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
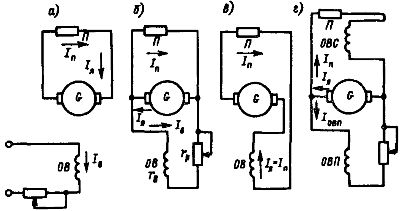
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
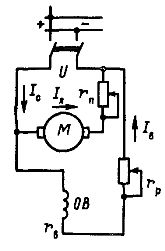
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Механические характеристики двигателей постоянного тока с различными способами возбуждения
1.Двигатель с параллельным возбуждением.


Рис. 1.10 Двигатель с параллельным возбуждением и диаграмма
В этом двигателе обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат Rр.в, а в цепь якоря — пусковой реостат Rп. Характерной особенностью двигателя является то, что его ток возбуждения не зависит от тока якоря (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. Следовательно, механическая характеристика будет линейной.
При отсутствии в цепи якоря добавочного сопротивления указанные характеристики жесткие (естественная характеристика 1 на рис.), так как падение напряжения в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3-5% от номинального. При включении добавочного реостата угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным сопротивлениям реостата. Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения F возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные двигатели большой и средней мощностей с параллельным возбуждением часто имеют небольшую последовательную обмотку возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при токе Iном составляет около 10% от МДС параллельной обмотки.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом изменяется и частота вращения п. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и может возникнуть круговой огонь.
Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения IВ также не зависит от тока якоря Iа.
2.Двигатель с последовательным возбуждением.
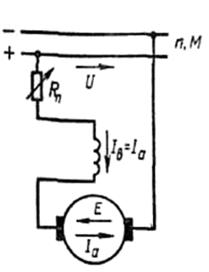

Рис. 1.11Двигатель с последовательным возбуждением и диаграмма
В этом двигателе ток возбуждения IB = Ia, поэтому магнитный поток Ф является некоторой функцией тока якоря.
Включая в цепь якоря пусковые реостаты с сопротивлениями  кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rп, тем ниже располагается характеристика.
кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rп, тем ниже располагается характеристика.
Механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер. При малых нагрузках частота вращения и резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 — 0,25) IН0М; только двигатели малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением.
3. Двигатель со смешанным возбуждением.
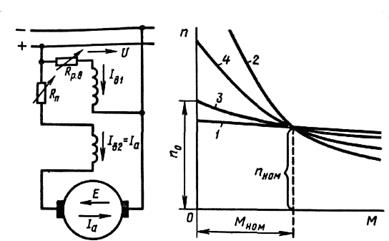
Рис. 1.12 Двигатели со смешанным возбуждением
В этом двигателе магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной и последовательной. Поэтому его механические характеристики (кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения п0 имеет конечное значение.
Источник
3.5. Механические характеристики двигателя постоянного тока при различных способах возбуждения
Механической характеристикой называется зависимость между вращающим моментом и частотой вращения М = f(n) или n = f(M). Поскольку М ≡ Iя, иногда удобно пользоваться электромеханической характеристикой n = f(Iя).
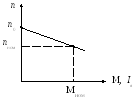
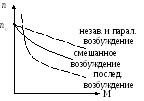
В двигателях с независимым и параллельным возбуждением механическая характеристика представляет собой прямую линию и может быть построена по двум точкам (рис. 3.3). Такая характеристика, при которой частота вращения меняется незначительно (менее 0% от nном) при изменении
момента сопротивления нагрузки на валу 0 2 , (3.7)
В двигателях с последовательным возбуждением обмотка возбуждения соединяется последовательно с обмоткой якоря и по ней протекает ток возбуждения, равный току якоря Iв = Iя.
Магнитный поток Ф ≡ Iя. Заменим Ф через kIя, где k – коэффициент пропорциональности.
 ;
;  ;
;  . (3.8)
. (3.8)
Тогда уравнение механической характеристики примет вид
 (3.9)
(3.9)
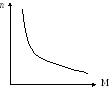
Характеристика мягкая и не имеет пересечения с осью n (рис. 3.4). Это значит, что двигатель с последовательным возбуждением боится х. х. (двигатель идет в «разнос»).
Мягкой характеристикой называется механическая характеристика, при которой частота вращения двигателя сильно изменяется в зависимости от изменения величины нагрузки на валу.
Двигатели с последовательным возбуждением широко применяются на электротранспорте и в крановых установках.
В двигателях смешанного возбуждения на каждом полюсе имеются по две катушки: одна принадлежит параллельной, другая – последовательной обмотке возбуждения. Создаваемые ими магнитные потоки складываются из трех потоков:
Механическая характеристика имеет вид (рис. 3.5). Такие машины применяются там, где требуется большой пусковой момент и возможны кратковременные перегрузки и большие ускорения: компрессоры, прокатные станы, шагающие экскаваторы, строгальные станки.
3.6. Потери энергии и кпд машин постоянного тока
Работа любой электрической машины сопровождается различного рода потерями энергии в ней, вызывающими нагрев машины. В машине постоянного тока при номинальной нагрузке электрические потери ∆Pэ составляют примерно 50% всех потерь, ∆Pэ = f( ) и называются переменными.
) и называются переменными.
Другими потерями являются так называемые постоянные потери ∆Pпост, в которые входят потери в стали ∆Рст (1–3% от Рном), потери механические на трение в подшипниках и вентиляционные ∆Рмех (1–2% от Рном) и потери в обмотке возбуждения ∆Рв (0,5–0,7% от Рном). Все эти потери практически не зависят от нагрузки двигателя.
Коэффициент полезного действия
В паспорте двигателя указывается полезная мощность, отдаваемая рабочему механизму Рном = Р2ном.
Потребляемая номинальная мощность
Зная Р1ном, легко определить номинальный ток двигателя
а зная Р2ном легко определить номинальный вращающий момент:
Источник



