- Графический способ вычисления работы
- Графический способ вычисления работы
- Графический способ определения работы силы
- Потенциальная энергия пружины — понятие, закон сохранения, уравнение
- Механическая работа. Мощность
- Вычисление работы силы упругости
- Ответы
- Потенциальная энергия упруго деформированного тела
- Закон сохранения энергии
Графический способ вычисления работы

Графический способ вычисления работы
Вычисление работы си ты на конечном пути по установленным формулам, без знания закона движения точки приложения силы, возможно лишь в частных случаях (например, при постоянной силе).
Для вычисления же работы силы в общем случае, когда сила может зависеть от времени, координат и скорости, нужно знать закон движения точки приложения силы. Только в этом случае можно выразить, как мы видели при решении задачи 86, все переменные в функции времени  и вычислить соответствующий интеграл.
и вычислить соответствующий интеграл.
Если же закон движения точки приложения силы неизвестен, то для вычисления работы силы нужно сначала найти этот закон, т. е. решить вторую основную задачу динамики.
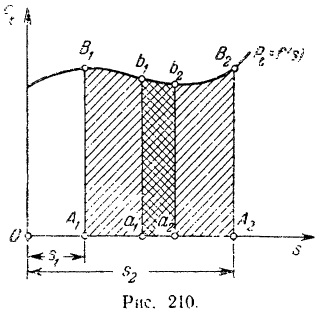
На практике для определения работы часто пользуются графическим способом, используя для этой цели график зависимости
По оси абсцисс этого графика (рис. 210) отложены, в некотором масштабе  значения дуговой координаты
значения дуговой координаты  точки приложения силы, а по оси ординат, также в каком-то масштабе
точки приложения силы, а по оси ординат, также в каком-то масштабе  , соответствующие им значения проекции этой силы на направление скорости точки
, соответствующие им значения проекции этой силы на направление скорости точки  , т.е.
, т.е.

Элементарная работа силы будет равна

Работа силы  на конечном перемещении ее точки приложения из положения
на конечном перемещении ее точки приложения из положения  с дуговой координатой
с дуговой координатой  в положение
в положение  с координатой
с координатой  будет выражаться в некотором масштабе площадью фигуры
будет выражаться в некотором масштабе площадью фигуры  (рис. 210):
(рис. 210):
Работа силы на некотором перемещении ее точки приложения выражается в определенном масштабе площадью фигуры, ограниченной осою абсцисс, кривой

и двумя ординатами, соответствующими начальному и конечному положениям точки приложение силы.
На рис. 210 алгебраические значения касательной составляющей  силы отложены и положительную сторону соответствующей оси и потому работа силы
силы отложены и положительную сторону соответствующей оси и потому работа силы  изображаемая площадью фигуры , будет положительной. Если же построенная кривая
изображаемая площадью фигуры , будет положительной. Если же построенная кривая

будет расположена от оси абсцисс в сторону отрицательных значений , то соответствующая площадь будет изображать отрицательную работу.
К графическому способу определения работы силы приходится прибегать в тех случаях, когда нам известны значения силы только для отдельных значении , установление же аналитической зависимости

затруднительно или даже невозможно. В ряде случаев (например, при определении работы пара или газа в цилиндрах паровой машины или двигателя) график зависимости

получается автоматически, при помощи самопишущих приборов, называемых индикаторами.
В заключение отметим следующее обстоятельство.
Хотя установленное в механике понятие работы (называемой иногда механической работой) и возникло из повседневного опыта, но оно не всегда совпадает с тем, что понимают под работой с физиологический точки зрения. Так, человек, неподвижно держащий па вытянутых руках тяжелый груз, не совершает, очевидно, с точки зрения механики, никакой работы ( ). С физиологической же точки зрения он совершает, конечно, определенную работу.
). С физиологической же точки зрения он совершает, конечно, определенную работу.
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Источник
Графический способ определения работы силы
Энергетические характеристики движения вводятся на основе понятия механической работы или работы силы .
Работой , совершаемой постоянной силой  называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла между векторами силы
называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла между векторами силы  и перемещения
и перемещения  (рис. 1.18.1):
(рис. 1.18.1):
|
Работа является скалярной величиной. Она может быть как положительной (), так и отрицательной (). При работа, совершаемая силой, равна нулю. В системе СИ работа измеряется в джоулях (Дж) .
Джоуль равен работе, совершаемой силой в на перемещении в направлении действия силы.
 | ||||||||
| Рисунок 1.18.1. Если проекция
Это сумма в пределе () переходит в интеграл. Графически работа определяется по площади криволинейной фигуры под графиком (рис. 1.18.2).
|
 силы
силы  на направление перемещения
на направление перемещения  не остается постоянной, работу следует вычислять для малых перемещений и суммировать результаты:
не остается постоянной, работу следует вычислять для малых перемещений и суммировать результаты: 
 модуль которой пропорционален удлинению пружины (рис. 1.18.3).
модуль которой пропорционален удлинению пружины (рис. 1.18.3).

 равна по модулю работе внешней силы
равна по модулю работе внешней силы  и противоположна ей по знаку.
и противоположна ей по знаку.