
Графический (геометрический) метод решения задач ЛП

Пример 6.1. Решить следующую задачу ли-нейного программирования геометрическим методом:

 .
.
Решение:
Задача линейного программирования задана в стандартной форме и имеет два проектных параметра, следовательно
, воз-можно ее решение геометрическим методом.
1 этап: построение прямых, ограничивающих область допустимых решений ( ОДР).
Рассмотрим систему ограничений задачи линейного програм-мирования (для удобства пронумеруем неравенства):


Рассмотрим первое ограничение, заменим знак неравенства знаком равенства и выразим переменную х2 через х1:
 .
.
Для построения прямой по данному уравнению зададим две произвольные точки, к примеру:

Аналогично определяем точки для остальных ограничений системы и строим по ним прямые, соответствующие каждому неравенству (рис. 1). Прямые пронумеруем согласно принятой ранее схеме.
2 этап: определение решения каждого из нера-венств системы ограничений.
Определим полуплоскости – решения каждого из неравенств.
Рассмотрим первое неравенство системы ограничений задачи. Возьмем какую-либо точку (контрольную точку), не принадлежащую соответствующей данному неравенству прямой, например, точку (0; 0). Подставим ее в рассматриваемое неравенство:
 .
.
При подстановке координат контрольной точки неравенство остается справедливым. Следовательно, множество точек, принадлежащих данной прямой (т.к. неравенство не строгое), а также расположенных ниже ее, будут являться решениями рассматриваемого неравенства (пометим на графике (рис. 1) найденную полуплоскость двумя стрелками направленными вниз рядом с прямой I) .
Аналогично определяем решения других неравенств и соответственно помечаем их графике. В результате график примет следующий вид:
3 этап: определение ОДР задачи линейного про- граммирования.
Найденные полуплоскости (решения каждого из неравенств системы ограничений) при пересечении образуют многоугольник ABCDEO, который и является ОДР рассматриваемой задачи.

Рис. 1. Область допустимых решений задачи
4 этап: построение вектора-градиента.
Вектор-градиент показывает направление максимизации целевой функции . Определим его координаты: координаты начальной его точки (точки приложения) – (0; 0), координаты второй точки:

Построим данный вектор на графике (рис. 2).
5 этап: построение прямой целевой функ-ции.
Рассмотрим целевую функцию данной задачи:
 .
.
Зададим ей какое-либо значение, к примеру,  . Выразим переменную х2 через х1:
. Выразим переменную х2 через х1:
 .
.
Для построения прямой по данному уравнению зададим две произвольные точки, к примеру:

Построим прямую соответствующую целевой функции (рис. 2).

Рис. 2. Построение целевой функции F(X) и вектора-градиента С
6 этап: определение максимума целевой функ-ции.
Перемещая прямую F(X) параллельно са-мой себе по направлению вектора-градиента, определяем крайнюю точку (точки) ОДР. Согласно графику (рис. 3), такой точкой является точка С – точка пересечения прямых I и II.

Рис. 3. Определение точки максимума целевой функции F(X)
Определим координаты точки С, с этой целью, решим сле-дующую систему линейных уравнений:

Подставим найденные координаты в целевую функцию и найдем ее оптимальное (максимальное) значение:

Ответ: при заданных ограничениях макси-мальное значение целевой функции F(Х)=24, которое достигается в точке С, координаты которой х1=6, х2=4.
Пример 6.2. Решить задачу линейного про- граммирования геометрическим методом:


Решение:
Этапы 1-3 аналогичны соответствующим этапам предыдущей задачи.
4 этап: построение вектора-градиента.
Построение вектора-градиента осуществляется аналогично, как и в предыдущей задаче. Построим данный вектор на графике (рис. 4). Отметим также на данном графике стрелкой направление, обратное вектору-градиенту, – направление минимизации целевой функцииF (X).
5 этап: построение прямой целевой функ-ции.
Построение прямой целевой функции F(X) осуществляется аналогично, как и в предыдущей задаче (результат построения приведен на рис. 4).

Рис. 4. Построение целевой функции F(x) и вектора-градиента С
6 этап: определение оптимума целевой функ-ции.
Перемещая прямую F(x) параллельно са-мой себе в направлении, обратном вектору-градиенту, опреде-ляем крайнюю точку (точки) ОДР. Согласно графику (рис. 5), та- кой точкой является точка О с координатами (0; 0).

Рис. 5. Определение точки минимума целевой функции
Подставляя координаты точки минимума в целевую функ-цию, определяем ее оптимальное (минимальное) значение, которое равно 0.
Ответ: при заданных ограничениях минимальное значение целевой функции F(Х)=0, которое достигается в точке О (0; 0).
Пример 6.3. Решить следующую задачу ли-нейного программирования геометрическим методом:


Решение:
Рассматриваемая задача линейного программирования задана в канонической форме, выделим в качестве базисных переменные x 1 и x2.
Составим расширенную матрицу и выделим с помощью метода Жордана- Гаусса базисные переменныеx1 и x 2.

Умножим (поэлементно) первую строку на –3 и сложим со вто-рой:  .
.
Умножим вторую строку на  :
:
 .
.
Сложим вторую с первой строкой:
 .
.
В результате система ограничений примет следующий вид:

Выразим базисные переменные через свободные:

Выразим целевую функцию также через свободные перемен-ные, для этого подставим полученные значения базисных переменных в целевую функцию:
 .
.
Запишем полученную задачу линейного программирования:


Так как переменные x1 и x2 неотрицательные, то полученную систему ограничений можно записать в следующем виде:

Тогда исходную задачу можно записать в виде следующей эк- вивалентной ей стандартной задаче линейного программирования:


Данная задача имеет два проектных параметра, следовательно, возможно ее решение геометрическим мето-дом.
1 этап: построение прямых, ограничивающих область допустимых решений ( ОДР).
Рассмотрим систему ограничений задачи линейного програм-мирования (для удобства пронумеруем неравенства):

Построим прямые, соответствующие каждому неравенству (рис. 6). Прямые пронумеруем согласно принятой ранее схе-ме.
2 этап: определение решения каждого из нера-венств системы ограничений.
С помощью контрольных точек определим полуплоскости – решения каждого из неравенств, и пометим их на графике (рис. 6) с помощью стрелок.
3 этап: определение ОДР задачи линейного про- граммирования.
Найденные полуплоскости (т.е. решения каждого из неравенств системы ограничений) не имеют общего пересечения (так решения неравенства I противоречат в целом остальным неравенствам системы ограничений), следовательно, система ограничений не совместна и задача линейного программирования в силу этого не имеет решения.

Рис. 6. Фрагмент MathCAD-документа:
построение области допустимых решений задачи
Ответ: рассматриваемая задача линейного программирования не имеет решения в силу несовместности системы ограничений.
Если после подстановки координат контрольной точки в неравенство его смысл нарушается, то решением данного неравенства является полуплоскость не содержащая данную точку (т.е. расположенная по другую сторону прямой).
Направление, обратное вектору-градиенту, соответствует направлению минимизации целевой функции.
Источник
Решение задачи линейного программирования графически
Определение. Любое решение системы ограничений называется допустимым решением ЗЛП.
Определение. Допустимое решение, в котором целевая функция достигает максимального или минимального значения, называется оптимальным решением.
В силу этих определений задача ЛП может быть сформулирована следующим образом: среди всех точек выпуклой области, являющейся решением системы ограничений, выбрать такую, координаты которой минимизируют (максимизируют) линейную функцию F = с1x + с2y.
Заметим, что переменные x, y в ЗЛП принимают, как правило, неотрицательные значения (x≥ 0, y ≥ 0), поэтому область расположена в I четверти координатной плоскости.
Рассмотрим линейную функцию F = с1x + с2y и зафиксируем какое-нибудь ее значение F. Пусть, к примеру, F = 0, т.е. с1x + с2y = 0. Графиком этого уравнения будет прямая, проходящая через начало координат (0;0) (рис.).

При графическом решении ЗЛП возможны два случая, которые требуют особого обсуждения.
Случай 1
Рисунок 6
При перемещении прямой с1x + с2y= d «вход» или «выход» (как на рисунке) произойдет по стороне многоугольника. Это случится, если в многоугольнике есть стороны, параллельные прямой с1х + с2у = d .
В этом случае точек «выхода» (« входа») бесчисленное множество, а именно – любая точка отрезка АВ. Это означает, что целевая функция принимает максимальное(минимальное) значение не в одной точке, а во всех точках, лежащих на соответствующей стороне многоугольника D.
Случай 2
Рассмотрим случай, когда область допустимых значений неограниченна.
В случае неограниченной области целевая функция может быть задана таким образом, что соответствующая ей прямая не имеет точки «выхода» (или «входа»). Тогда максимальное значение функции (минимальное) не достигается никогда – говорят, что функция не ограничена.
Рисунок
Необходимо найти максимальное значение целевой функции F = 4x+6y → max , при системе ограничений
x+y≤18
0,5x+y≤12
x≤12
y≤9
x≥0, y≥0
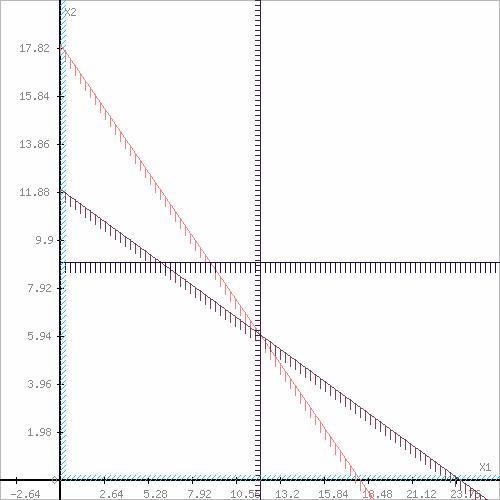
Построим область допустимых решений, т.е. решим графически систему неравенств. Для этого построим каждую прямую и определим полуплоскости, заданные неравенствами.
x + y = 18
| x | 12 | 9 |
| y | 6 | 9 |
0,5x + y = 12
| x | 12 | 18 |
| y | 6 | 3 |
x = 12 – параллельна оси OY ;
y = 9 – параллельна оси OX ;
x = 0 – ось OY ;
y = 0 – ось OX;
x≥ 0 – полуплоскость правее оси OY;
y ≥ 0 – полуплоскость выше оси OX;
y ≤ 9 – полуплоскость ниже y = 9;
x ≤ 12 – полуплоскость левее x = 12;
0,5x + y≤ 12 – полуплоскость ниже прямой 0,5x + y = 12;
x + y≤ 18 – полуплоскость ниже прямой x + y = 18.
Рассмотрим целевую функцию задачи F = 4x + 6y → max.
Построим прямую, отвечающую значению функции F = 0 : 4x + 6y = 0. Будем двигать эту прямую параллельным образом. Из всего семейства прямых 4x+ 6y = const последней вершиной, через которую пройдет прямая при выходе за границу многоугольника, будет вершина С (12; 6). Именно в ней F = 4x + 6y достигнет своего максимального значения.
Значит, при x = 12, y = 6 функция F достигает своего максимального значения F = 4 ∙ 12 + 6 ∙ 6 = 84, равного 84. Точка с координатами (12; 6) удовлетворяет всем неравенствам системы ограничений, и в ней значение целевой функции оптимально F* = 84 (оптимальное значение будем обозначать «*»).
Задача решена. Итак, необходимо выпустить 12 изделий I вида и 6 изделий II вида, при этом прибыль составит 84 тыс. руб.
Графический метод применяется для решения задач, которые имели в системе ограничений только две переменные. Этот метод может применяться и для систем неравенств, имеющих три переменных. Геометрически ситуация будет иная, роль прямых будут играть плоскости в трехмерном пространстве, а решением неравенства от трех переменных будет являться полупространство, находящееся по одну сторону от плоскости. Роль областей будут играть многогранники, являющиеся пересечением полупространств.
Пример №2 . Шахта разрабатывает два пласта. Выход штыба по первому пласту составляет а1 %; по второму — а2 %. Максимальная производительность очистного забоя по первому пласту составляет В1 тыс.тонн в год, по второму пласту — В2 тыс.тонн в год. По технологии работ добыча со второго пласта не может превышать добычу с первого пласта. Выход штыба по шахте не должен превышать С1 тыс.тонн в год. Общая нагрузка по двум пластам за год должна быть не меньше С2 тыс.тонн в год. Составить математическую модель и построить множество допустимых значений нагрузки по первому и второму пластам за год.
Пример №3 . Магазин продает 2 вида безалкогольных напитков : Колу и лимонад. Доход от одной банки колы составляет 5 центов, тогда как доход от одной банки лимонада 7 центов. В среднем магазин за день продает не более 500 банок обоих напитков. Несмотря на то, что колу выпускает известная торговая марка, покупатели предпочитают лимонад, поскольку он значительно дешевле. Подсчитано, что объем продаж колы и лимонада должны соотноситься не менее 2:1 кроме того , известно что магазин продает не менее 100 банок колы в день. Сколько банок каждого напитка должен иметь магазин в начале рабочего дня для максимизации дохода?
Пример №4 . Решить задачу линейного программирования приближенно графическим способом с последующим вычислением точного значения и мах(min) значения целевой функции.
Пример №5 . Туристской фирме требуется не более а трехтонных автобусов и не более в пятитонных автобусов. Отпускная цена автобусов первой марки 20000 у.е., второй марки 40000 у.е. Туристская фирма может выделить для приобретения автобусов не более с у.е. Сколько следует приобрести автобусов каждой марки в отдельности, чтобы их общая (суммарная) грузоподъёмность была максимальной. Решить задачу графическим методом.
Пример №6 . Используя графический метод, найдите оптимальный производственный план в задаче, заданной таблицей.
Пример №7 . Решить графическим методом задачу линейного программирования, подвергнув систему ограничений задачи преобразованиям Жордано-Гаусса. Система ограничений задачи имеет вид:
a11x1 + a12x2 + a13x3 + a14x4 + a15x5 = b1
a21x1 + a22x2 + a23x3 + a24x4 + a25x5 = b2
a31x1 + a32x2 + a33x3 + a34x4 + a35x5 = b3
Методические рекомендации. Преобразования Жордано-Гаусса можно выполнить с помощью этого сервиса или через исследование СЛАУ.
Пример №8 . Предприятие выпускает два вида продукции А и В, для производства которых используется сырье трех видов. На изготовление единицы изделия А требуется затратить сырья каждого вида а1, а2, а3 кг соответственно, а для единицы изделия В — в1, в2, в3 кг. Производство обеспечено сырьем каждого вида в количестве Р1, Р2, Р3 кг, соответственно. Стоимость единицы изделия А составляет С1 руб., а единицы изделия В — С2 руб. Требуется составить план производства изделий А и В, обеспечивающий максимальную стоимость готовой продукции.
Пример №9 . Необходимо найти максимальное значение целевой функции F = 4x+6y → max, при системе ограничений:
x+y≤18
0,5x+y≤12
x≤12
y≤9
x≥0, y≥0
Построим область допустимых решений, т.е. решим графически систему неравенств. Для этого выбираем количество ограничений равное 4 (рисунок 1).
Затем заполняем коэффициенты при переменных и сами ограничения (рисунок 2).

Пересечением всех этих полуплоскостей является пятиугольник ABCDE, с вершинами в точках A(0; 0), B(0;9), C(6; 9), D(12;6), E(12;0). Этот пятиугольник и образует область допустимых решений задачи.
Рассмотрим целевую функцию задачи F = 4x+6y → max.
| x | 3 | 0 |
| y | –2 | 0 |
Построим прямую, отвечающую значению функции F = 0 : 4x + 6y = 0. Будем двигать эту прямую параллельным образом. Из всего семейства прямых 4x + 6y = const последней вершиной, через которую пройдет прямая при выходе за границу многоугольника, будет вершина С (12; 6). Именно в ней F = 4x + 6y достигнет своего максимального значения.
Источник



