
Геометрический способ сложения сходящихся сил

Геометрический способ сложения сходящихся сил
Системой сходящихся сил называется система сил, линии действия которых пересекаются в одной точке (рис. 15,а). Если мы перенесем все силы такой системы но линиям их действия в общую точку пересечения этих
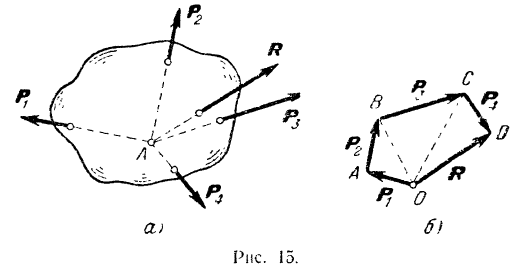
линии, то, согласно первому следствию из аксиом статики, действие системы на абсолютно твердое тело не изменится. Таким образом, любую систему сходящихся сил можно заменить эквивалентной системой сил, приложенных в одной точке.
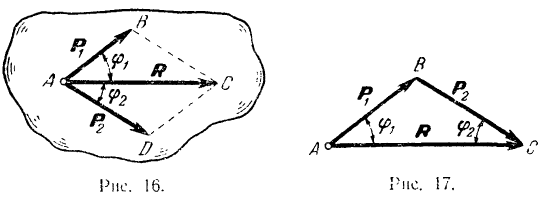
Задача о сложении двух сил, приложенных к одной точке, геометрически решается построением соответствующего параллелограмма сил (рис. 16) или силового треугольника (рис. 17), изображающего одну из половин параллелограмма.
Для построения силового треугольника из конца вектора одной силы  проводим вектор
проводим вектор  , изображающий вторую силу
, изображающий вторую силу  . Замыкающая сторона
. Замыкающая сторона  треугольника изображает но модулю и по направлению равнодействующую
треугольника изображает но модулю и по направлению равнодействующую  двух данных сходящихся сил.
двух данных сходящихся сил.
Последовательно применяя правило треугольника, можно найти равнодействующую любого числа сходящихся сил, например четырех сил  и
и  (рис. 15, а). Для этого из_произвольной точки
(рис. 15, а). Для этого из_произвольной точки  (рис. 15,6) отложим вектор
(рис. 15,6) отложим вектор  , изображающий в принятом масштабе силу , из конца его— вектор
, изображающий в принятом масштабе силу , из конца его— вектор  , из его конца — вектор
, из его конца — вектор  и т. д., помещая всякий раз начало следующего вектора в конце предыдущего, пока не исчерпаем все силы.
и т. д., помещая всякий раз начало следующего вектора в конце предыдущего, пока не исчерпаем все силы.
Полученный многоугольник  , стороны которого в выбранном масштабе равны модулям составляющих сил и одинаково с ними направлены, называется силовым многоугольником.
, стороны которого в выбранном масштабе равны модулям составляющих сил и одинаково с ними направлены, называется силовым многоугольником.
Очевидно, что равнодействующая  сил
сил  и
и  изображается (рис. 15,6) вектором
изображается (рис. 15,6) вектором  , равнодействующая
, равнодействующая  сил и
сил и  изображается вектором
изображается вектором  ) и замыкающая сторона
) и замыкающая сторона  силового многоугольника, направленная от начала вектора первой силы к концу вектора последней, изображает в выбранном масштабе равнодействующую данной системы сходящихся сил (т. е. сил и ) как по модулю, так и по направлению.
силового многоугольника, направленная от начала вектора первой силы к концу вектора последней, изображает в выбранном масштабе равнодействующую данной системы сходящихся сил (т. е. сил и ) как по модулю, так и по направлению.
Правило сложения сходящихся сил по способу многоугольника является общим правилом сложения любых векторов и называется их геометрическим сложением.
Геометрическая сумма всех сил любой системы называется главным вектором  этой системы
этой системы

Таким образом, можно сказать, что равнодействующая системы сходящихся сил проходит через общую точку пересечения линий действия этих сил и равна по модулю и направлению их главному вектору.
Геометрическая сумма векторов не зависит от перемены мест слагаемых и, следовательно, при изменении порядка сложения сил их главный векгор не изменяется.
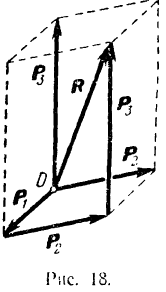
В частном случае трех сходящихся сил  и
и  не лежащих в одной плоскости (рис. 18), их равнодействующая изображается по модулю и направлению диагональю параллелепипеда, построенного на векторах составляющих сил (правило параллелепипеда).
не лежащих в одной плоскости (рис. 18), их равнодействующая изображается по модулю и направлению диагональю параллелепипеда, построенного на векторах составляющих сил (правило параллелепипеда).
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Возможно вам будут полезны эти дополнительные темы:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Источник
Геометрический способ сложения сил.
Проекция силы на ось и на плоскость.
Перейдем к рассмотрению аналитического (численного) метода решения задач статики. Этот метод основывается на понятии о проекции силы на ось. Как и для всякого другого вектора, проекцией силы на ось называется скалярная величина, равная взятой с соответствующим знаком длине отрезка, заключенного между проекциями начала и конца силы. Проекция имеет знак плюс, если перемещение от ее начала к концу происходит в положительном направлении оси, и знак минус — если в отрицательном. Из определения следует, что проекции данной силы на любые параллельные и одинаково направленные оси равны друг другу. Этим удобно пользоваться при вычислении проекции силы на ось, не лежащую в одной плоскости с силой.
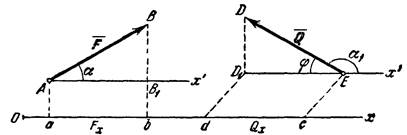
Рис. 1
Обозначать проекцию силы  на ось Ох будем символом Fx. Тогда для сил, изображенных на рис.1, получим:
на ось Ох будем символом Fx. Тогда для сил, изображенных на рис.1, получим:

Но из чертежа видно, что 

т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направлением оси. При этом проекция будет положительной, если угол между направлением силы и положительным направлением оси — острый, и отрицательной, если этот угол — тупой; если сила перпендикулярна к оси, то ее проекция на ось равна нулю.
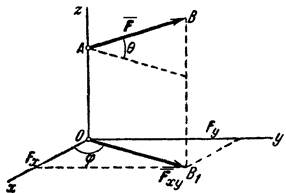
Рис.2
Проекцией силы на плоскость Оху называется вектор  , заключенный между проекциями начала и конца силы на эту плоскость (рис. 2). Таким образом, в отличие от проекции силы на ось, проекция силы на плоскость есть величина векторная, так как она характеризуется не только своим численным значением, но и направлением в плоскости Оху. По модулю
, заключенный между проекциями начала и конца силы на эту плоскость (рис. 2). Таким образом, в отличие от проекции силы на ось, проекция силы на плоскость есть величина векторная, так как она характеризуется не только своим численным значением, но и направлением в плоскости Оху. По модулю  , где
, где  — угол между направлением силы и ее проекции
— угол между направлением силы и ее проекции  .
.
В некоторых случаях для нахождения проекции силы на ось бывает удобнее найти сначала ее проекцию на плоскость, в которой эта ось лежит, а затем найденную проекцию на плоскость спроектировать на данную ось.
Например, в случае, изображенном на рис. 2, найдем таким способом, что


Геометрический способ сложения сил.
Решение многих задач механики связано с известной из векторной алгебры операцией сложения векторов и, в частности, сил. Величину, равную геометрической сумме сил какой-нибудь системы, будем называть главным вектором этой системы сил. Понятие о геометрической сумме сил не следует смешивать с понятием о равнодействующей, для многих систем сил, как мы увидим в дальнейшем, равнодействующей вообще не существует, геометрическую же сумму (главный вектор) можно вычислить для любой системы сил.
Геометрическая сумма (главный вектор) любой системы сил определяется или последовательным сложением сил системы по правилу параллелограмма, или построением силового многоугольника. Второй способ является более простым и удобным. Для нахождения этим способом суммы сил  (рис. 3, a), откладываем от произвольной точки О (рис. 3, б) вектор Oa, изображающий в выбранном масштабе cилу F1, от точки a откладываем вектор
(рис. 3, a), откладываем от произвольной точки О (рис. 3, б) вектор Oa, изображающий в выбранном масштабе cилу F1, от точки a откладываем вектор  , изображающий силу F2, от точки b откладываем вектор bc, изображающий силу F3 и т. д.; от конца m предпоследнего вектора откладываем вектор mn, изображающий силуFn.Соединяя начало первого вектора с концом последнего, получаем вектор
, изображающий силу F2, от точки b откладываем вектор bc, изображающий силу F3 и т. д.; от конца m предпоследнего вектора откладываем вектор mn, изображающий силуFn.Соединяя начало первого вектора с концом последнего, получаем вектор  , изображающий геометрическую сумму или главный вектор слагаемых сил:
, изображающий геометрическую сумму или главный вектор слагаемых сил:
 или
или 
От порядка, в котором будут откладываться векторы сил, модуль и направление  не зависят. Легко видеть, что проделанное построение представляет собою результат последовательного применения правила силового треугольника.
не зависят. Легко видеть, что проделанное построение представляет собою результат последовательного применения правила силового треугольника.
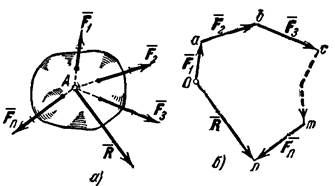
Рис.3
Фигура, построенная на рис. 3,б, называется силовым (в общем случае векторным) многоугольником. Таким образом, геометрическая сумма или главный вектор нескольких сил изображается замыкающей стороной силового многоугольника, построенного из этих сил (правило силового многоугольника). При построении векторного многоугольника следует помнить, что у всех слагаемых векторов стрелки должны быть направлены в одну сторону (по обводу многоугольника), а у вектора — в сторону противоположную.
Равнодействующая сходящихся сил. При изучении статики мы будем последовательно переходить от рассмотрения более простых систем сил к более сложным. Начнем с рассмотрения системы сходящихся сил.
Сходящимися называются силы, линии действия которых пересекаются в одной точке, называемой центром системы (см. рис. 3, а).
По следствию из первых двух аксиом статики система сходящихся сил, действующих на абсолютно твердое тело, эквивалентна системе сил, приложенных в одной точке (на рис. 3, а в точке А).
Последовательно применяя аксиому параллелограмма сил, приходим к выводу, что система сходящихся сил имеет равнодействующую, равную геометрической сумме (главному вектору) этих сил и приложенную в точке их пересечения. Следовательно, если силы сходятся в точке A (рис. 3, а), то сила, равная главному вектору , найденному построением силового многоугольника, и приложенная в точке А, будет равнодействующей этой системы сил.
1. Результат графического определения равнодействующей не изменится, если силы суммировать в другой последовательности, хотя при этом мы получим другой силовой многоугольник — отличный от первого.
2. Фактически силовой многоугольник, составленный из векторов сил заданной системы, является ломаной линией, а не многоугольником в привычном смысле этого слова.
3. Отметим, что в общем случае этот многоугольник будет пространственной фигурой, поэтому графический метод определения равнодействующей удобен только для плоской системы сил.
Источник



