
Определение равнодействующей системы сил аналитическим способом
Практическая работа 1
Тема: Определение реакций связей аналитическим и графическим способами.
Цель: Изучить виды связей, научиться определять их реакции.
Теоретическая часть:
Тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным.
Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным.
Все то, что ограничивает перемещения данного тела в пространстве, называется связью.
Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется силой реакции связи или реакцией связи.
Реакция связи направлена в сторону, противоположную той, куда связь не дает перемещаться телу.
Аксиома связей. Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
Все виды связей можно разделить на несколько типов.
1. Связь – гладкая опора (без трения).

Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рисунок 1.1).
2. Гибкая связь (нить, веревка, трос, цепь).
Реакция нити направлена вдоль нить от тела, при этом нить может быть только растянута (рисунок 1.2).

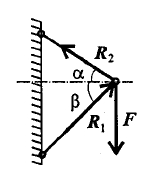
3. Жесткий стержень.
Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи (рисунок 1.3).
4. Шарнирная опора.
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир. Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т.к. не допускается только перемещение поперек опорной поверхности
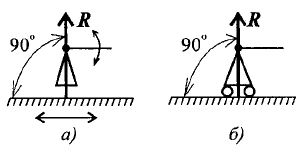
Неподвижный шарнир. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Её принято изображать в виде двух составляющих: горизонтальной и вертикальной (рисунок 1.5).

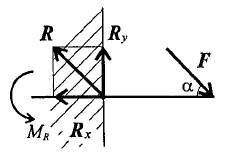
5. Защемление или «заделка».
Любые перемещения точки крепления невозможны.
Реактивную силу принято представлять в виде двух составляющих вдоль осей координат (рисунок 1.6).
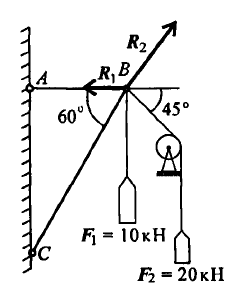
Пример.
Грузы подвешены на стержнях и канатах и находятся в равновесии. Определить реакции стержней АВ и СВ (рисунок 1.7).
1. Аналитический способ.
1. Определяем вероятные направления реакций. Мысленно убираем стержень АВ, при этом стержень СВ опускается, следовательно, точка В отодвигается от стены: назначение стержня АВ – тянуть точку В к стене.
Если убрать стержень СВ, точка В опустится, следовательно, стержень СВ поддерживает точку В снизу – реакция направлена в верх.
2. Освобождаем точку В от связи.
3. Выберем направление осей координат, ось Ох совпадает с реакцией  .
.
4. Запишем уравнения равновесия точки В:
 ;
;
 .
.
5. Из второго уравнения получаем:
 .
.
Из первого уравнения получаем:
 .
.
2. Графический способ.
1. Выбираем масштабный коэффициент сил: µ = 1 Н/мм
Определяем отрезки, изображающие силы  и
и  :
:
 ,
,
 .
.
2. Полученная система сил находится в равновесии, поэтому силовой
многоугольник должен быть замкнутым (рисунок 1.8).

3. Вычисляем реакции и  , полученные в результате графического
, полученные в результате графического
 ,
,
 .
.
 .
.
 ;
;
 .
.
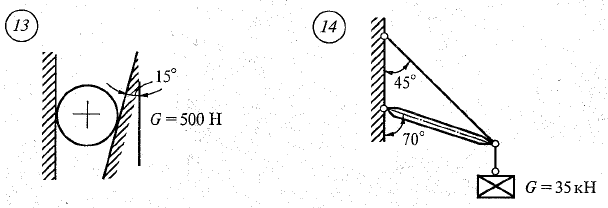
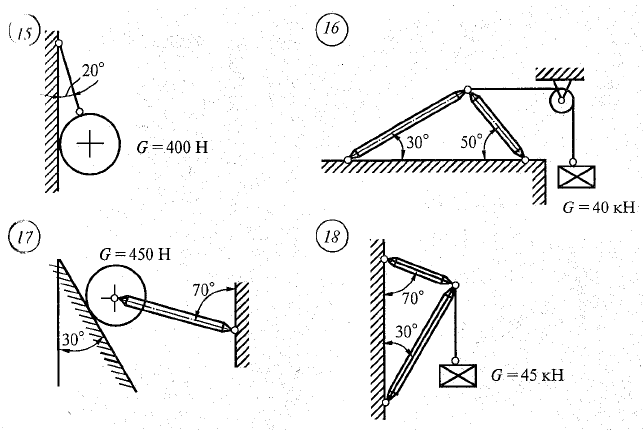
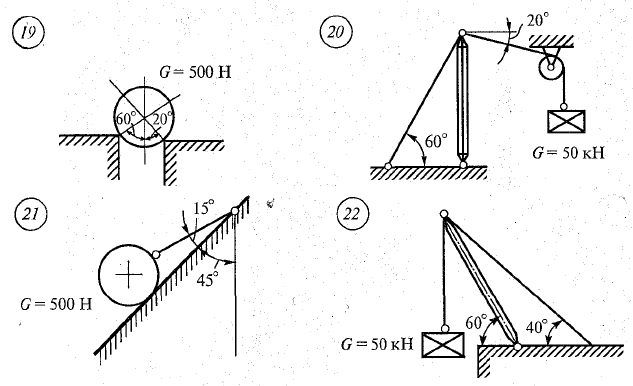
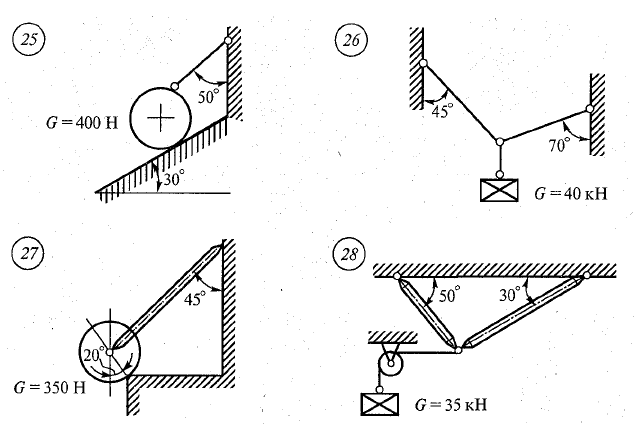
Задание.
Аналитически и графически определить реакции связей, сравнить результаты.




Контрольные вопросы.
1. Что называется связью?
2. Перечислите основные виды опор.
3. Запишите аксиому связей.
4. Как направлена реакция гибкой нити?
Содержание отчета
1. Схема фигуры в масштабе
3. Ответы на контрольные вопросы
Практическая работа № 2
Тема:Определение реакций опор двух опорной балки.
Цель работы:Научится определять реакции опор балки установленной на двух опорах.
Теоретическая часть:
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).

Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Таким образом, проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону отрицательной полуоси (рис. 3.2).

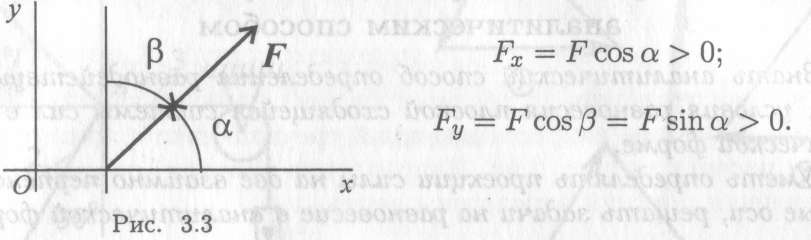
Проекция силы на две взаимно перпендикулярные оси (рис. 3.3).
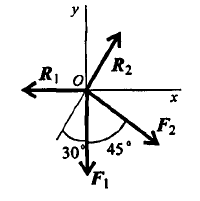
Определение равнодействующей системы сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом.
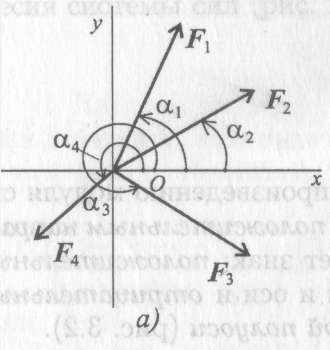
Выберем систему координат, определим пропорции всех заданных векторов на эти оси (рис. 3.4, а).
Складываем проекции всех векторов на оси х и у (рис. 3.4, б).

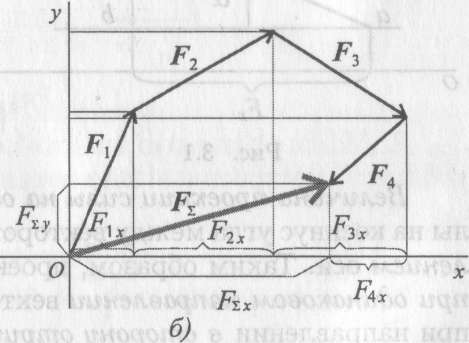
| Рис. 3.4 |
Модуль (величину) равнодействующей можно найти по известным проекциям:

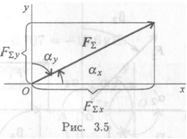
Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующей с осями координат (рис. 3.5).
Источник
Определение реакций связи

Определение реакций
Обозначим через  проекции на неподвижные оси координат силы реакции, действующей на v-тую точку системы. Тогда уравнении равновесия каждой точки системы можно будет записать в виде
проекции на неподвижные оси координат силы реакции, действующей на v-тую точку системы. Тогда уравнении равновесия каждой точки системы можно будет записать в виде

Сравнивая эти уравнения с уравнениями равновесия (е), заметим, что они совпадают, если положить

Эти соотношения можно использовать для определения реакций связи.
Рассмотрим вектор  с проекциями
с проекциями

Коллинеарный вектору п нормали к поверхности

в точке  причем вектор n будем считать направленным в сторону возрастания функции
причем вектор n будем считать направленным в сторону возрастания функции  (рис. 136). Вектор
(рис. 136). Вектор  будет направлен в сторону убывания функции
будет направлен в сторону убывания функции  и определит реакцию, действующую на v-тую точку со стороны связи
и определит реакцию, действующую на v-тую точку со стороны связи
Замечание. Уравнения равновесия со множителями для освобождающих связен получены из принципа возможных перемещении при рассмотрении неосвобождающих перемещений. Эти уравнении определяют как положение равновесия, так и реакции связен. Поэтому реакции односторонних связей могут быть всегда найдены в предположении, что связи являются двусторонними.
Пример:
Исследовать условия равновесия шара на гладком горизонтальном полу, принимая последний за одностороннюю связь.
Решение:
Уравнение равновесия с множителями имеет вид

связь может быть задана условием  поэтому
поэтому

Отсюда реакция связи определяется однозначно

и направлена вверх.

Пример:
Исследовать равновесие тяжелой материальной точки, на которую наложены связи (рис. 137),

Решение:
Из принципа возможных перемещении имеем

откуда, приравнивая нулю коэффициенты при  получим
получим

Сначала рассмотрим случай, когда в натянутом состоянии находятся обе сняли (положения 1 и 2). Тогда из уравнений связи будем иметь

Подставляя эти значения в уравнения равновесия, получим

Но такие значения  не могут соответствовать положениям равновесия (в положении равновесия все
не могут соответствовать положениям равновесия (в положении равновесия все  следовательно, при натянутых связях положений равновесия не существует.
следовательно, при натянутых связях положений равновесия не существует.
Если в натянутом состоянии находятся только связь  то уравнения равновесия становятся противоречивыми:
то уравнения равновесия становятся противоречивыми:

т. е. и в этом случае положения равновесия не существует.
Если же оказывается натянутой только связь  то уравнения равновесия
то уравнения равновесия

будем иметь решение

причем ?ч принимает отрицательное значение лишь при  т. е. возможно только одно положение равновесия (положение 3)
т. е. возможно только одно положение равновесия (положение 3)

Пример:
Материальная точка с массой т находится внутри трехосного эллипсоида с полуосями a, b и с. На точку действует сила тяжести, параллельная оси г, и сила отталкивания от оси’г, пропорциональная расстоянию точки от этой осн. Найти положения равновесия точки.
Решение:
Уравнение связи запишется в виде

Из принципа Бернулли имеем

Дифференцируя уравнение связи

и применяя метод множителей Лагранжа, получим

Отсюда сразу получаем уравнения равновесия:

Присоединяя сюда уравнение связи, найдем следующие решения:


Пторое и третье решения существуют, если выполняются соответственно условия

Эта лекция взята со страницы, где размещены все лекции по предмету теоретическая механика:
Эти страницы возможно вам будут полезны:


Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Источник



