
Естественный способ описания механического движения
В кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси.
1. Векторный способ.
В этом способе положение материальной точки `A` задаётся с помощью так называемого радиус-вектора `vecr`, который представляет собой вектор, проведённый из точки `O`, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку `A` (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени `vecr=vecr(t)`.
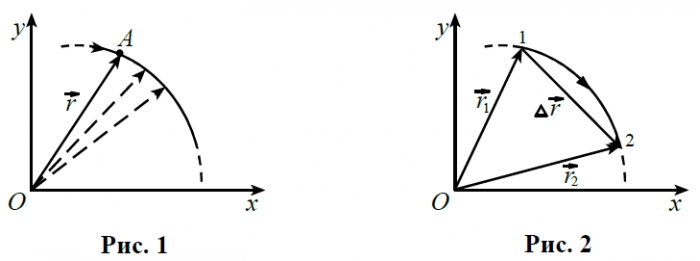
Геометрическое место концов радиус-вектора `vecr(t)` называют траекторией точки `A`.
В известном смысле траектория движения представляет собой след (явный или воображаемый), который «оставляет за собой» точка `A` после прохождения той или иной области пространства. Понятно, что геометрическая форма траектории зависит от выбора системы отсчёта, относительно которой ведётся наблюдение за движением точки.
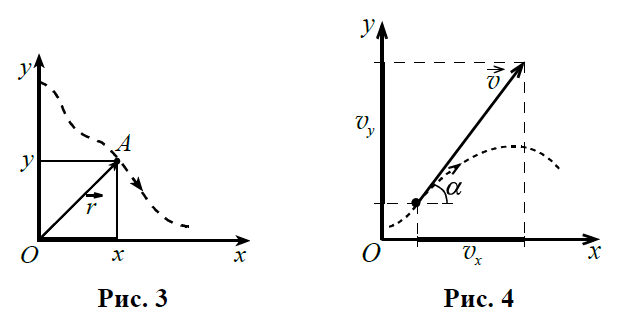
Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени `Delta t` тело (точка `A`) переместилось из начального положения `1` с радиус-вектором `vec r_1` в конечное положение `2` с радиус-вектором `vec r_2` (рис. 2). Приращение `Deltavec r` радиус-вектора тела в таком случае равно: `Deltavec r = vec r_2- vec r_1`.
Вектор `Deltavec r`, соединяющий начальное и конечное положения тела, называют перемещением тела.
Отношение `Delta vec r//Delta t` называют средней скоростью (средним вектором скорости) `vec v_»cp»` тела за время `Delta t`:
`vecv_»cp»=(Deltavecr)/(Delta t)` (1)
Вектор `vecv_»cp»` коллинеарен и сонаправлен с вектором `Deltavec r`, так как отличается от последнего лишь скалярным неотрицательным множителем `1//Delta t`.
Предложенное определение средней скорости справедливо для любых значений `Delta t`, кроме `Delta t=0`. Однако ничто не мешает брать промежуток времени `Delta t` сколь угодно малым, но отличным от нуля.
Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени `t` или в конкретной точке траектории. С этой целью промежуток времени `Delta t` устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение `Delta vec r`. При этом отношение `Deltavec r//Delta t` стремится к определённому значению, не зависящему от `Delta t`.
Величина, к которой стремится отношение `Deltavec r//Delta t` при стремлении `Delta t` к нулю, называется мгновенной скоростью`vec v`:
`vec v =(Delta vec r)/(Delta t)` при `Delta t -> 0`.
Теперь заметим, что чем меньше `Delta t`, тем ближе направление `Deltavec r` к направлению касательной к траектории в данной точке. Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела.
В дальнейшем там, где это не повлечёт недоразумений, мы будем опускать прилагательное «мгновенная» и говорить просто о скорости `vec v` тела (материальной точки).
Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения. Его определяют через отношение приращения вектора скорости `Delta vec v` тела к промежутку времени `Delta t`, в течение которого это приращение произошло.
Ускорением `veca` тела называется величина, к которой стремится отношение `Delta vec v//Delta t` при стремлении к нулю знаменателя `Delta t`:
`vec a =(Delta vec v)/(Delta t)` при `Delta t -> 0` (2)
При уменьшении `Delta t` ориентация вектора`Delta vec v` будет приближаться к определённому направлению, которое принимается за направление вектора ускорения `vec a`. Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости!
Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (`»м»//»с»`) и метр на секунду в квадрате ( `»м»//»с»^2`).
2. Координатный способ.
В этом способе положение материальной точки `A` на плоскости в произвольный момент времени `t` определяется двумя координатами `x` и `y`, которые представляют собой проекции радиус-вектора $$ \overrightarrow
3. Естественный (или траекторный) способ.
Этот способ применяют тогда, когда траектория материальной точки известна заранее. На заданной траектории `LM` (рис. 5) выбирают начало отсчёта – неподвижную точку `O`, а положение движущейся материальной точки `A` определяют при помощи так называемой дуговой координаты `l`, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта `O` до точки `A`. При этом положительное направление отсчёта координаты `l` выбирают произвольно, по соображениям удобства, например так, как показано стрелкой на рис. 5.
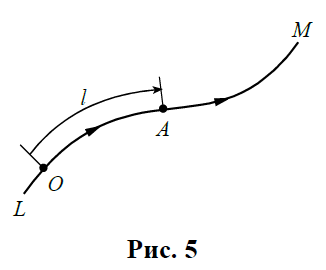
Движение тела определено, если известны его траектория, начало отсчёта `O`, положительное направление отсчёта дуговой координаты `l` и зависимость $$ l\left(t\right)$$.
Следующие два важных механических понятия – это пройденный путь и средняя путевая скорость.
По определению, путь `Delta S` — это длина участка траектории, пройденного телом за промежуток времени `Delta t`.
Ясно, что пройденный путь – величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением `Delta vec r`, представляющим собой вектор. Сравнивать можно только путь `Delta S` и модуль перемещения `
|Delta vecr|`. Очевидно, что `Delta S >=|Deltavec r|`.
Средней путевой скоростью `v_»cp»` тела называют отношение пути `Delta S` к промежутку времени `Delta t`, в течение которого этот путь был пройден:
`v_»cp»=(Delta S)/(Delta t)` (3)
Определённая ранее средняя скорость `v_»cp»` (см. формулу (1)) и средняя путевая скорость отличаются друг от друга так же, как `Deltavec r` отличается от `Delta S`, но при этом важно понимать, что обе средние скорости имеют смысл только тогда, когда указан промежуток времени усреднения `Delta t`. Само слово «средняя» означает усреднение по времени.
Городской троллейбус утром вышел на маршрут, а через 8часов, проехав в общей сложности `72` км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость `vec v_»cp»` и средняя путевая скорость `v_»cp»` троллейбуса?
Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение `Delta vecr` равно нулю: `Deltavecr=0`, следовательно, `vecv_»ср»=Deltavecr//Deltat=0` и `|vecv_»ср»|=0`. Но средняя путевая скорость троллейбуса не равна нулю:
`v_»cp»=(Delta S)/(Delta t)=(72 «км»)/(8 «ч»)=9 «км»//»ч»`.
Источник
Способы описания механического движения.
Способы описания механического движения.
по средством указания вектора Aв каждый момент времени –
векторный способ,естественный –по параметрам движения например пройденному частицей.
Координатный – посредством указаний проекций в декартовой системе координат.
Векторный способ описания движения заключается в нахождении величины и направления радиус-вектора rв любой
момент времени, т. е. установлении вида зависимости:
r(t) = r(t)·er(t),
где r(t) — модуль (величина) радиус-вектора;
er(t) — единичный век тор, задающий направление вектора r.
 er = r/r =
er = r/r =
Эквивалентность различных способов описания движения.
Путь и траектория. Понятие средней и мгновенной скорости и ускорения. Скорость прохождения пути. Поиск графика движения по его характеристикам.
Вектором средней скорости называется величина, равная отношению приращения радиус-вектора к промежутку времени, в течение которого оно произошло.
Vср = ∆r/∆t. Вектор средней скорости сонаправлен вектору перемещения,
но их величины не равны друг другу и, кроме того, измеряются в разных единицах. Для описания движения в конкретный момент времени
используется понятие мгновенной скорости, V=lim ∆r/∆t=dr/dt. Мгновенная скорость показывает, как быстро изменяется радиус-вектор материальной точки при бесконечно малом приращении времени Dt для выбранного момента t. Траектория – воображаемая непрерывная линия по которой перемещается мат. точка в пространстве. Вектором среднего ускорения называется физическая
величина, равная отношению приращения вектора скорости к промежутку времени, в течение которого оно произошло.
aср = ∆V /∆t. Мгновенное ускорение равно пределу, к которому стремится
среднее ускорение при ∆t, стремящемуся к нулю, или производной от вектора скорости по времени:
a=lim ∆v/∆t=dv/dt.
Скорость прохождения пути.
∆S=∫│V(t)│dt; Vs ср = ∆s/∆t;
|Vср.|(t)= 1/(t-tₒ)∫│V(t)│dt; Vsср=|V|ср.
4. Преобразования Галилея. Инвариантность пространственных и временных интервалов в классической физике. Законы преобразований скоростей и ускорений.
Преобразования Галилея.Выявим связь между пространственными координатами в неподвижной относительно наблюдателя — лабораторной СО (ЛСО) S и СО S’, движущейся
относительно нее равномерно прямолинейно. Пусть СО S’
смещается в положительном направлении вдоль оси OX с постоянной скоростьюV, для
любого момента времени можно записать выражение, связывающее радиус-вектор r‘ частицы A в подвижной и ЛСО:
rA’ = rA — r‘0 = rA – V*t.
Здесь мы учли абсолютный характер времени и предварительно проведенную операцию синхронизации часов в начальный
момент времени, когда начала обеих систем координат совпадали (т. е. tₒ = tₒ’ = 0). Спроецировав это уравнение на оси координат и учтя абсолютность времени и предварительно проведенную в этих системах от счета процедуру синхронизации часов, получим прямые и обратные преобразования Галилея:
x’ = x – V*t; y’ = y; z’ = z; t’ = t;
x = x’ + V*t’; y’ = y; z’ = z; t’ = t.
Согласно преобразованиям Галилея: одновременность — инвариант преобразований. События, одновременные в одной СО, одновременны в любой другой системе отсчета, движущейся относительно
нее равномерно прямолинейно;
временной и пространственный интервалы — инварианты преобразований Галилея.
Инвариантные величины в классической механике.
Докажем утверждение об инвариантности пространственного
интервала применительно к классической механике (т. е. его
инвариантность к преобразованиям Галилея).Пусть СО S’ движется относительно системы S с переменной скоростью V(t), много меньшей скорости света. Используя принцип независимости перемещений, можно записать, что радиус-векторы произвольных точек A и B в этих СО в приближении классической механики связаны между собой следующими соотношениями: rA=r’A+∫V(t)dt; rB=r’B+∫V(t)dt;
Из этих соотношений следует, что пространственный ин тер вал ∆r = |∆r| не зависит от вы бора СО:|∆r‘|=|r‘B- r‘A|=|rB- rA| = |∆r|. Пространственный интервал в классической механике есть абсолютная величина по отношению к выбору СО.Из однородности времени, однородности и изотропности пространства, а так же преобразований Галилея вытекают обобщения повседневного опыта и удается выявить характеристики пространственно-временных отношений, не зависящие от выбора СО, в том числе движущихся. Ими являются временные и пространственные интервалы. Временной и пространственный интервалы инвариантны по
отношению к преобразованиям Галилея.
Закон преобразования скоростей. Скорость частицы при переходе от описания движения в одной СО к описанию движения в другой изменяется в соответствии со следующим
уравнением, называемым законом преобразования скоростей:
v=v’ + V, где v — абсолютная скорость (скорость частицы относительно ЛСО); v’ относительная скорость (скорость частицы относительно движущейся СО системы S’);
Vпереносная скорость (скорость движения системы S’ относительно ЛСО).
Движение материальной точки по окружности и её кинематические характеристики: вектор элементарного углового перемещения, угловая скорость и ускорение. Связь линейных и угловых кинематических характеристик.
Движение частицы по окружности как движение с одной степенью свободы.При движении частицы поокружности меняется только направление ее радиус-вектора r(t). Уравнение, характеризующее изменение положения материальной точки со временем, имеет вид:r(t) = r·e(t), где r = const; er — единичный вектор, направленный вдоль r. Пусть радиус-вектор частицы описывает конус. Тогда его сечение плоскостью XO’Y, перпендикулярной оси OZ — оси
симметрии этого конуса, образует окружность радиуса r
В декартовой СК зависимости координат частицы от
времени имеют следующий вид: x(t)=p·cosφ(t); y(t)=p·sinφ(t),
а траектория частицы задается уравнением: x*x+y*y=p*p
Понятие вектора элементарного углов го перемещения.Рассмотрим движение частицы в плоскости XY в полярных координатах. В данном случае поскольку частица обладает одной степенью свободы, ее движение удобно характеризовать зависимостью угловой координаты (угла) от времени φ(t)и может быть описано следующим образом:
r=const. φ=φ(t) . По аналогии с понятием вектора элементарного перемещения drвведем понятие вектора элементарного углового перемещения dφ . За величину вектора dφ примем значение угла, на который повернется частица вокруг оси OZ за время dt, выраженное в радианах. Направление вектора dφ зададим таким образом, чтобы оно совпадало с осью вращения и определялось в соответствии с правилом буравчика или правого винта. следует, что вектора линейного и углов го перемещений связаны соотношением dr=[dφ*r] и не
зависят от выбора положения тела от счета (точки O) на оси
вращения. Модуль вектора drравен dr=dφ·r·sinθ=dφ·p и не зависит от выбора точки О на оси OZ Направление вектора drзадается следующим образом. Вектора dφ и rизображают исходящими из одной точки. Затем головку правого винта поворачивают от dφ к r. Направление вектора dr) будет совпадать с направлением поступательного движения правого винта. Чтобы быть вектором, величина должна удовлетворять закону сложения векторов. Последовательность перемещений на элементарные углы подчиняется этому закону и величина dφ с этой точки зрения может быть вектором. Перемещения же на конечные углы ∆φ этому правилу не удовлетворяют. Кроме этого, при повороте на конечный угол ∆φ модуль вектора перемещения равен: |∆r|=2r*sinθ*sin∆φ/2 и, следовательно, соотношение dr=[dφ*r] в этом случае не выполняется. Для малых углов поворота оно соблюдается приближенно и тем точнее, чем величина 2· sin(∆φ/2) ближе к ∆φ.
Вектор угловой скорости – физическая величина, равная производной от вектора углового перемещения по времени:
Вектор углового ускорения – физическая величина, равная производной от угловой скорости по времени:
Связь: a=sqrt(a(тао в квадрате)+a(n-ое в квардате))
A(тао)= [ε,r]. a(n-ое) =[ω[ω.r]]
Описание движения несвободных частиц в ИСО. Понятие силы и массы. Второй закон Ньютона. Процедура измерения массы, свойства массы. Понятие импульса материальной точки. Второй закон Ньютона в Импульсивной форме.
Частица, которая не изменяет в результате взаимодействия с другими телами свои свойства (например массу), но изменяет характеристики своего состояния (радиус-вектор и скорость) называется несвободной. изменение характеристик состояния несвободнойчастицы происходит под влиянием внешнего воздействия.Сила— физическая величина, являющаяся мерой воздействия одного тела или поля на другое тело. Масса – физическая величина – отражающая способность частицы сопротивляться внешнему воздействию. Масса является мерой инертности тела по отношению к внешнему воздействию. В этой связи ее называют инертной массой. Свойства массы: аддитивность — M=m1+m2. масса величина скалярная, значение которой постоянно в медленно движущихся ИСО, Второй закон Ньютона – Ускорение зависит от силы прямо пропорционально а от массы обратно пропорционально. Второй закон Ньютона можно применять в любых ИСО, движущихся со скоростями, много меньшими скорости света. Импульс – произведение массы частицы на вектор её скорости. P=mv.Закон движения в импульсивной форме:
F=ma=m*dv/dt=dvm/dt=dP/dt
10.Действие и противодействие. Третий закон Ньютона. Область применимости третьего закона Ньютона. В природе нет односторонних действий, есть исключительно взаимодействия. Третий закон рассматривает взаимодействие тел. Этот закон утверждает, что независимо от природы взаимодействия любая пара тел действует друг на друга с силами, равными по величине и направленными в противоположные стороны вдоль прямой, соединяющей эти тела.
11. Понятие неинерциальной СО. Силы инерции и их свойства. Причины возникновения сил инерции.
Сила инерции сила, сообщающая телу дополнительное ускорение, которое не вызвано взаимодействием с
другими телами или полями и обусловлено ускоренным характером движения системы отсчета. Свойства: пропорциональна ускорению, пропорциональна массе тела, направлена против вектора ускорения с которым движется НСО. (В НСО ВТОРОЙ ЗАКОН НЬЮТОНА НЕ ВЫПОЛНЯЕТСЯ)
Способы описания механического движения.
по средством указания вектора Aв каждый момент времени –
векторный способ,естественный –по параметрам движения например пройденному частицей.
Координатный – посредством указаний проекций в декартовой системе координат.
Векторный способ описания движения заключается в нахождении величины и направления радиус-вектора rв любой
момент времени, т. е. установлении вида зависимости:
r(t) = r(t)·er(t),
где r(t) — модуль (величина) радиус-вектора;
er(t) — единичный век тор, задающий направление вектора r.
er = r/r =
Эквивалентность различных способов описания движения.
Источник



