
Естественный способ задания движения точки
Введение
Естественный способ задания движения материальной точки применяется в тех случаях, когда траектория заранее известна. Например, точка движется внутри желоба в твердом теле. В этом случае мы, произвольным образом, выбираем некоторую неподвижную точку на траектории. Эту точку мы принимаем за начало отсчета. Далее мы произвольным образом выбираем положительное направление. Рассмотрим подвижную точку на траектории. Пусть – расстояние от точки до точки , измеренное вдоль дуги траектории. Введем криволинейную координату следующим образом. Если точка находится в положительном направлении относительно начала отсчета , то . Если точка находится в отрицательном направлении относительно начала отсчета , то . Тогда криволинейная координата однозначно определяет положение точки на траектории. При движении точки, координата изменяется со временем :
.
Таким образом, при естественном способе задания движения материальной точки, мы задаем следующие данные:
1) траекторию точки;
2) начало отсчета с указанием положительного и отрицательного направления отсчета;
3) криволинейную координату, как функцию от времени: .
Определение кинематических величин
В начале мы должны определить геометрические характеристики траектории – касательную, главную нормаль и радиус кривизны.
По заданной траектории, для любого положения точки, мы можем определить единичный вектор , направленный по касательной к траектории; единичный вектор , направленный вдоль главной нормали (к центру кривизны) траектории и радиус кривизны траектории. Поскольку вектор можно направить по касательной двумя взаимно противоположными способами, то мы направим вектор вдоль направления, которое мы приняли за положительное. Вектор можно направить только одним способом – к центру кривизны траектории. Векторы и представляют собой два орта естественного трехгранника. В простых случаях, найти векторы , и радиус кривизны траектории можно геометрическим способом (см. пример решения задачи ниже). Как найти эти величины в более сложных случаях, указано на странице “Оси естественного трехгранника”. Там же приводится пример определения векторов , и радиуса кривизны траектории для винтовой линии.
После того, как мы определили орты естественного трехгранника , и радиус кривизны траектории , мы можем найти векторы скорости и ускорения точки . Выводы представленных ниже формул даны на странице “Кинематика материальной точки”.
Дифференцируя по , находим проекцию скорости на вектор :
.
Модуль скорости:
.
Вектор скорости:
.
Скорость, как и следовало, направлена по касательной к траектории. Если скорость направлена в положительном направлении, то
.
Если скорость направлена в отрицательном направлении, то
.
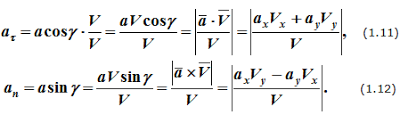
Дифференцируя по , находим тангенциальное ускорение (проекцию ускорения на вектор ):
.
Вектор тангенциального ускорения:
.
Нормальное ускорение:
.
Вектор нормального ускорения:
.
Вектор полного ускорения:
.
Модуль полного ускорения:
.
Пример решения задачи
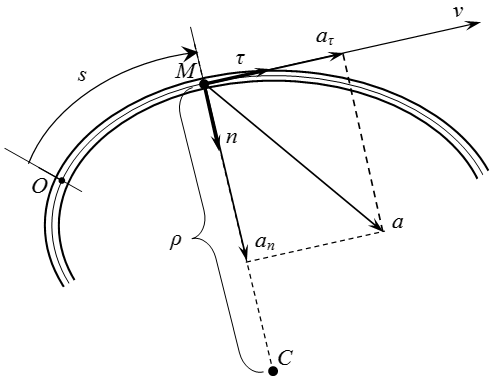
Точка движется по дуге окружности радиуса по закону
( s – в метрах, t – в секундах), где – расстояние от до , измеренное вдоль дуги окружности. Определить скорость и ускорение точки в момент времени . Изобразить на рисунке векторы и , считая, что точка в этот момент находится в положении , а положительное направление отсчета – от к .

Определим положение точки в момент времени .
.
Пусть – центр окружности. Угол между векторами и :
.
По условию, положительное направление – от к , то есть слева направо. Поскольку , то точка расположена слева от точки .

Дифференцируя по , находим проекцию скорости на направление касательной к траектории:
.
В момент времени :
.
Поскольку , то вектор скорости направлен по касательной к траектории в сторону возрастания . Абсолютное значение (модуль) скорости:
.
Дифференцируя по , находим касательное ускорение точки:
.
В момент времени :
.
Поскольку , то вектор касательного ускорения направлен по касательной к траектории в сторону возрастания .
Нормальное ускорение:
.
Вектор направлен к центру окружности.
Автор: Олег Одинцов . Опубликовано: 09-04-2016
Источник
Естественный способ описания движения формула скорости
Движение. Виды движений. Описание движения. Система отсчета.
Механическим движением тела (точки) называется изменение его положения в пространстве относительно других тел с течением времени.
А) Равномерное прямолинейное движение материальной точки.
Б) Равноускоренное прямолинейное движение материальной точки.
В) Движение тела по дуге окружности с постоянной по модулю скоростью.
Г) Гармоническое колебательное движение. Важным случаем механического движения являются колебания, при которых параметры движения точки (координаты, скорость, ускорение) повторяются через определенные промежутки времени.
1. Векторный способ описания движения
ОПРЕДЕЛЕНИЕ: Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки М в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r = r ( t ) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение s точки.

2. Координатный способ описания движения
ОПРЕДЕЛЕНИЕ: Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

В декартовой системе координат положение точки определяется тройкой чисел ( x , y , z ) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: x = x ( t ), y = y ( t ), z = z ( t )
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки: rx = x , ry = y , rz = z .
3. Естественный способ описания движения
ОПРЕДЕЛЕНИЕ: Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О 1 , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О 1 . При движении точка М переместится в точку М 1 , соответственно изменится ее расстояние от точки О 1 . Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s = s ( t ) .



Под системой отсчета понимают тело отсчета, которое условно считается неподвижным, систему координат, связанную с телом отсчета, и часы, также связанные с телом отсчета. В кинематике система отсчета выбирается в соответствии с конкретными условиями задачи описания движения тела.
Источник
iSopromat.ru

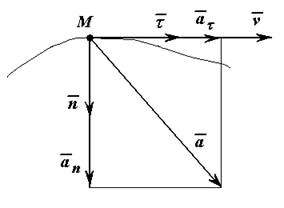
При естественном способе задания движения точки предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении.
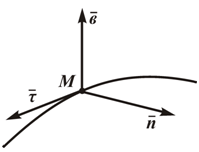
- τ — орт касательной;
- n — орт нормали;
- b — орт бинормали;
Единичные орты τ, n, b определяют направление соответствующих осей в каждой точке кривой.
Чтобы задать закон движения точки естественным способом необходимо:
- знать траекторию движения;
- установить начало отсчета на этой кривой;
- установить положительное направление движения;
- дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪OM=S(t).
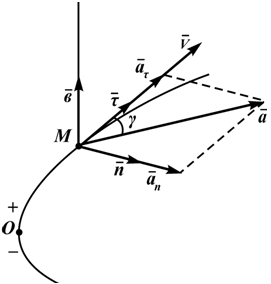
Зная эти параметры можно найти все кинематические характеристики точки в любой момент времени (рисунок 1.5).
Скорость и ускорение точки
Скорость точки при естественном способе задания её движения определяется по формулам
Первая формула определяет величину и направление вектора скорости, вторая формула только величину.
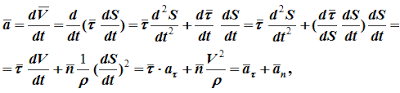
Ускорение определяется как производная от вектора скорости:

оно характеризует быстроту изменения величины скорости точки;
Нормальное ускорение точки
характеризует быстроту изменения направления вектора скорости;
ρ — радиус кривизны траектории в данной точке (например, для окружности: ρ = R, для прямой линии ρ = ∞).
Полное ускорение точки при естественном способе задания движения определяется следующим образом (рисунок 1.5):

Ранее отмечалось, что всегда можно перейти от одного способа задания закона движения точки к другому, например, от координатного к векторному. Поэтому, преобразовывая одни и те же формулы, можно получить другое их написание.

Далее, для естественнго способа задания движения точки, получаем
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
iSopromat.ru
Рассмотрим определение скорости и ускорения точек при естественном способе задания движения:
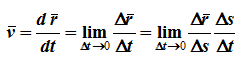

— единичный вектор касательной, тогда
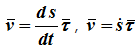
Алгебраическая скорость – это проекция вектора скорости на касательную, равная производной от дуговой координаты по времени.
Если производная положительна, то точка движется в положительном направлении отсчета дуговой координаты.
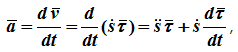
поскольку τ — переменный по направлению вектор, то:

определяется только свойствами траектории в окрестности данной точки, при этом

n — единичный вектор главной нормали,
ρ — радиус кривизны траектории в данной точке.
т.е. вектор ускорения раскладывается на две составляющие — касательное и нормальное ускорения:

- алгебраическое значение касательного ускорения (проекция вектора ускорения на касательную) характеризует изменение скорости по величине;

Движение точки ускоренное, если знаки проекций векторов скорости и ускорения на касательную совпадают.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник



