
Техническая механика. Конспекты лекций (стр. 3 )
 | Из за большого объема этот материал размещен на нескольких страницах: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |

Модуль равнодействующей двух сил можно определить из треугольника ACD: 
На основании четвертой аксиомы одну силу F∑ можно заменять двумя составляющими силами F1 и F2. Такую замену часто производят при решении задач статики.
Пятая аксиома устанавливает, что в природе не может быть одностороннего действия силы. При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие. Так, если на тело В действует сила F1 со стороны материального тела А, то на тело А действует со стороны тела В такая же по численному значению сила F2. Обе силы действуют по одной прямой и направлены в противоположные стороны. Действие и противодействие всегда приложены к различным телам, и именно поэтому они не могут уравновешиваться(рис.6).

Рис.6 Иллюстрации к пятой аксиоме статики
4 Связи и их реакции
Рассматриваемые в механике тела могут быть свободными и несвободными. Свободным называют тело, которое не испытывает никаких препятствий для перемещения в пространстве в любом направлении. Если же тело связано с другими телами, которые ограничивают его движение в одном или нескольких направлениях, то оно является несвободным. Тела, которые ограничивают движение рассматриваемого тела, называют связями.
При взаимодействии между телом и его связями возникают силы, противодействующие возможным движениям тела. Эти силы действуют на тело со стороны связей и называются реакциями связей.
Реакция связи всегда противоположна тому направлению, по которому связь препятствует движению тела. Существование реакций обосновывается аксиомой о действии и противодействии. Для определения реакций связей используют принцип освобождения от связей. Не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией. Определение реакций связей является одной из наиболее важных задач статики. Ниже приведены наиболее распространенные виды связей, встречающиеся в задачах:
1. Связь в виде гладкой (т. е. без трения) плоскости или поверхности. В этом случае реакция связи всегда направлена по нормали к опорной поверхности (рис.7а).
2. Связь в виде контакта цилиндрической или шаровой поверхности с плоскостью. В этом случае реакция связи направлена также по нормали к опорной поверхности (рис.7б).
3. Cвязь в виде шероховатой плоскости. Здесь возникают две составляющие реакции: нормальная Rn, перпендикулярная плоскости, и касательная Rt, лежащая в плоскости. Касательная реакция Rt называется силой трения и всегда направлена в сторону, противоположную действительному или возможному движению тела.
Полная реакция R, равная геометрической сумме нормальной и касательной составляющих R=Rn+Rt, отклоняется от нормали к опорной поверхности на некоторый угол р. При взаимодействии тела с реальными связями возникают силы трения. Однако во многих случаях силы трения незначительны и вследствие этого ими часто пренебрегают (рис.7в).
4. Гибкая связь, осуществляемая веревкой, тросом, цепью и т. п. (рис.7г). Реакции гибких связей направлены вдоль связей, причем гибкая связь может работать только на растяжение.
5. Связь в виде жесткого прямого стержня с шарнирным закреплением концов. Здесь реакции всегда направлены вдоль осей стержней. Стержни при этом могут быть как растянутыми, так и сжатыми (рис.7д).
6. Связь, осуществляемая ребром двугранного угла или точечной опорой. Реакция такой связи направлена перпендикулярно поверхности опирающегося тела (рис.7е).

Рис.7 Виды связей.
Тема 1.2 Плоская система сходящихся сил
Лекция № 3 «Плоская система сходящихся сил»
1. Плоская система сходящихся сил



Рис. 8 Силовой многоугольник
Рассмотрим равновесие системы сходящихся сил. Сходящимися называются силы, линии действия которых пересекаются в одной точке (рис. 8а). Существуют два способа сложения пересекающихся сил: геометрический (рис. 8б) и аналитический (рис. 8в).
Геометрический способ сложения сходящихся сил.
От произвольной точки О откладываем вектор, равный силе  1; от конца 1 откладываем вектор, равный силе 2, и т. д. (см. рис.8, а, б). Затем, соединяя начало вектора 1 с концом последнего 4, получаем равнодействующую всех сил. Построенная фигура называется силовым многоугольником.
1; от конца 1 откладываем вектор, равный силе 2, и т. д. (см. рис.8, а, б). Затем, соединяя начало вектора 1 с концом последнего 4, получаем равнодействующую всех сил. Построенная фигура называется силовым многоугольником.
Аналитический метод сложения сходящихся сил. Проектируя векторное равенство 1+2+3=  на оси координат, получим два алгебраических равенства:
на оси координат, получим два алгебраических равенства:
Flx + F2x + F3x = Rx;
F1 cos  1 — F2 cos 2 — F3 cos 3 = — R cos .
1 — F2 cos 2 — F3 cos 3 = — R cos .
Отсюда определим значение равнодействующей всех сходящихся сил:

и направление вектора :
Условием равновесия системы сходящихся сил является равенство нулю модуля равнодействующей , т. е. силовой многоугольник должен быть замкнутым (при геометрическом способе сложения) или, аналитически, проекции равнодействующей силы на оси координат должны быть равны нулю (Rx = Ry = 0). Отсюда для плоской системы сходящихся сил получим два уравнения равновесия этих сил:

Следовательно, для равновесия системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на каждую из осей координат была равна нулю.
Метод проекций
Осью называют прямую линию, которой приписано определенное направление. Проекция вектора на ось является скалярной величиной, которая определяется отрезком оси, отсекаемым перпендикулярами, опущенными на нее из начала и конца вектора.

Рис.9 Виды проекций
Проекция вектора считается положительной (+), если направление от начала проекции к ее концу совпадает с положительным направлением оси. Проекция вектора считается отрицательной (—), если направление от начала проекции к ее концу противоположно положительному направлению оси.
Тема 1.3 Пара сил и момент силы относительно точки
Лекция № 4 «Пара сил. Момент силы»
Парой сил называют две силы  и
и  равные по величине, противоположно направленные и параллельные между собой (рис. 10).
равные по величине, противоположно направленные и параллельные между собой (рис. 10).

Сила, действующая на тело, может не только смещать его, но и поворачивать вокруг какой-нибудь точки. Пусть сила , приложенная в точке А, стремится повернуть тело вокруг точки О (рис. 10). Поскольку силу можно переносить по линии ее действия, то вращательный эффект этой силы не будет зависеть от того, в какой точке эта сила приложена, и будет зависеть от расстояния h от точки О до линии действия силы.
Моментом силы F относительно некоторого центра О называется величина, равная произведению силы на кратчайшее расстояние от точки О до линии действия силы и взятая с соответствующим знаком. Знак «плюс» соответствует моменту силы, которая стремится повернуть тело вокруг точки О против хода часовой стрелки, а знак «минус» — если сила стремится повернуть тело по направлению движения часовой стрелки. Если линия действия силы проходит через точку, то момент силы относительно этой точки равен нулю. Перпендикуляр, опущенный из точки О на линию действия силы , называется ее плечом относительно центра О.
Источник
Сложение сил
Способы сложения сил:
Если две или более сил направлены в одну сторону, их просто складывают. Вы толкаете автомобиль и его толкают еще несколько человек в ту же сторону, силы складываются, автомобиль катится.
Или если все вместе поднимают тяжелый шкаф или телевизор. В одну сторону действует подъемная сила, а в противоположную сторону сила тяжести. Тогда происходит вычитание силы тяжести из ваших сил. И только когда ваша совокупная сила подъема станет больше силы тяжести, телевизор будет поднят.
Если силы будут одинаковыми, но разнонаправленными, то тело будет оставаться в покое: кто-то толкает тело с одной стороны, кто-то с другой, если сила равна, тело останется на месте.

Редактировать этот урок и/или добавить задание Добавить свой урок и/или задание
Добавить интересную новость
Добавить анкету репетитора и получать бесплатно заявки на обучение от учеников
user->isGuest) < echo (Html::a('Войдите', ['/user/security/login'], ['class' =>»]) . ‘ или ‘ . Html::a(‘зарегистрируйтесь’, [‘/user/registration/register’], [‘class’ => »]) . ‘ , чтобы получать деньги $$$ за каждый набранный балл!’); > else < if(!empty(\Yii::$app->user->identity->profile->first_name) || !empty(\Yii::$app->user->identity->profile->surname))< $name = \Yii::$app->user->identity->profile->first_name . ‘ ‘ . \Yii::$app->user->identity->profile->surname; > else < $name = ''; >echo ‘Получайте деньги за каждый набранный балл!’; > ?>—>
Добавление комментариев доступно только зарегистрированным пользователям
![]()
Lorem iorLorem ipsum dolor sit amet, sed do eiusmod tempbore et dolore maLorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempborgna aliquoLorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempbore et dLorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempborlore m mollit anim id est laborum.
28.01.17 / 22:14, Иван Иванович Ответить +5
![]()
Lorem ipsum dolor sit amet, consectetu sed do eiusmod qui officia deserunt mollit anim id est laborum.
28.01.17 / 22:14, Иван ИвановичОтветить -2
![]()
Lorem ipsum dolor sit amet, consectetur adipisicing sed do eiusmod tempboLorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod temLorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempborpborrum.
28.01.17 / 22:14, Иван Иванович Ответить +5
Источник
Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
Правило параллелограмма и правило многоугольника
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Пример 1
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
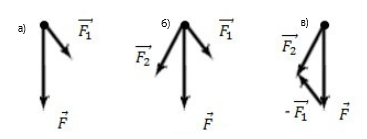
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
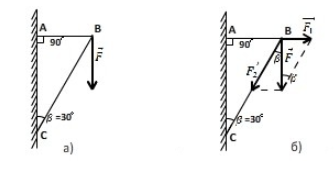
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .
Источник



