
Два способа задания положения точки
§ 7. Три способа задания положения точки в пространстве
1. Координатный способ.
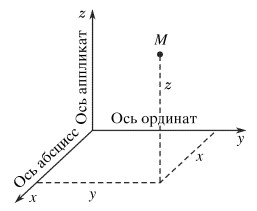
Координаты определяют положение точки однозначно: например, M ( x , y , z ). Они являются числами, которые могут быть положительными, отрицательными или равными нулю.
2. Векторный способ задания положения точки на плоскости и в пространстве.
Определение. Радиус-вектором
некоторой точки пространства называется вектор, проведённый из начала координат в данную точку пространства.
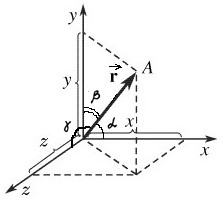
Радиус-вектор также однозначно определяет положение точки в пространстве, так как он указывает, в каком направлении расположена точка, а модуль этого вектора указывает, на каком расстоянии находится точка от начала координат.
Проекции радиуса-вектора на оси координат равны координатам конца этого вектора (см. рис. выше).

 — модуль радиус-вектора
— модуль радиус-вектора
 ;
;  ;
;  — направляющие косинусы радиус-вектора
— направляющие косинусы радиус-вектора 
3. Естественный способ задания положения точки.
Он применяется тогда, когда известна траектория, по которой движется точка.
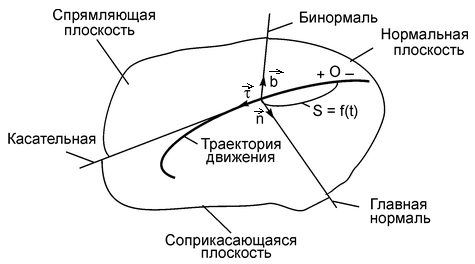
На траектории выбирают начало координат, а также положительное и отрицательное направление отсчёта дуговых координат. Векторные величины в этом случае проецируются на так называемые естественные оси координат: нормаль  , касательную
, касательную  (тау), а также бинормаль
(тау), а также бинормаль  .
.
Начало естественных осей координат совмещают с той точкой траектории, через которую в данный момент проходит движущаяся точка. Касательную проводят в положительном направлении отсчёта дуг. Нормаль проводят перпендикулярно касательной и вовнутрь вогнутости траектории. Бинормаль направляют перпендикулярно плоскости, в которой расположены векторы и , причём с конца вектора бинормали поворот от к по наименьшему углу между ними должен наблюдаться против часовой стрелки.

Никакую часть этого материала ни в каких целях, включая образовательные и научные, нельзя без письменного разрешения владельца авторских прав дублировать в сети Интернет и воспроизводить в какой бы то ни было форме и какими бы то ни было средствами, будь то электронные или механические, включая запись на магнитный или электронный носитель, вывод на печать, фотокопирование.
Источник
Способы задания положения точки и описание ее движения — Кинематика — МЕХАНИКА
1.1. Кинематика
1.1.5. Способы задания положения точки и описание ее движения
Положение точки в пространстве задается двумя способами:
1) с помощью координат; 2) с помощью радиус-вектора.
Положение точки с помощью координат задается тремя проекциями точки х, у, z на оси декартовой системы координат ОХ, ОУ, ОZ, связанные с телом отсчета (рис. 1.3). Для этого из точки А необходимо опустить перпендикуляры на плоскости УZ (координата х), ХZ (координата у), ХУ (координата z) соответственно. Записывается это так: А (х, у, z). Для конкретного случая, изображенного на рис. 1.3 (х = 6, у = 10, z = 4,5), точка А обозначается A (6; 10; 4,5).

Наоборот, если заданы конкретные значения координат точки в данной системе координат, то для изображения самой точки необходимо отложить значения координат на соответствующие оси (х на ось ОХ и т. д.) и на этих трех взаимно перпендикулярных отрезках построить параллелепипед. Вершина его, противоположная началу координат О и лежащая на диагонали параллелепипеда, и будет искомой точкой А.
Если точка движется в пределах некоторой плоскости, то через выбранные на теле отсчета точки достаточно провести две координатные оси: ОХ и ОУ. Тогда положение точки на плоскости определяют двумя координатами х и у (рис. 1.4).

Если точка движется вдоль прямой, достаточно задать одну координатную ось ОХ и направить ее вдоль линии движения.
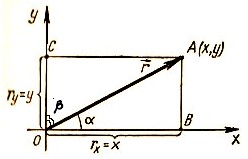
Задание положения точки А с помощью радиус-вектора осуществляется соединением точки А с началом координат О (рис. 1.4). Направленный отрезок О А =  называется радиус-вектором.
называется радиус-вектором.
Радиус-вектор — это вектор, соединяющий начало отсчета с положением точки в произвольный момент времени.
Точка задана радиус-вектором, если известны его длина (модуль) и направление в пространстве, т. е. значения его проекций rх, ry, rz на оси координат ОХ, ОУ, OZ, либо углы между радиус-вектором и осями координат. Для случая движения на плоскости (рис. 1.4) имеем:

Здесь r =  | — модуль радиус-вектора ,
| — модуль радиус-вектора ,  х и y — его проекции на оси координат, все три величины — скаляры; х и у — координаты точки А.
х и y — его проекции на оси координат, все три величины — скаляры; х и у — координаты точки А.
Последние уравнения демонстрируют связь между координатным и векторным способами задания положения точки.
Вектор г можно также разложить на составляющие по осям X и У, т. е. представить в виде суммы двух векторов (рис. 1.4):

Таким образом, положение точки в пространстве задается либо ее координатами, либо радиус- вектором.
Способы описания движения точки
В соответствии со способами задания координат движение точки можно описать: 1) координатным способом; 2) векторным способом.
При координатном способе описания (или задания) движения изменение координат точки со временем записывается в виде функций всех трех ее координат от времени:

Уравнения (1.1) называют кинематическими уравнениями движения точки, записанными в координатной форме. Зная кинематические уравнения движения и начальные условия (т. е. положение точки в начальный момент времени), можно определить положение точки в любой момент времени.
При векторном способе описания движения точки изменение ее положения со временем задается зависимостью радиус-вектора от времени:

Уравнение (1.2) представляет собой уравнение движения точки, записанное в векторной форме. Если оно известно, то для любого момента времени можно рассчитать радиус-вектор точки, т. е. определить ее положение (как и в случае координатного способа). Таким образом, задание трех скалярных уравнений (1.1) равносильно заданию одного векторного уравнения (1.2).
Для каждого случая движения вид уравнений (1.1) или (1.2) будет вполне определенным. Если траекторией движения точки является прямая линия, движение называетсяпрямолинейным, а если кривая — криволинейным.
Библиотека образовательных материалов для студентов, учителей, учеников и их родителей.
Наш сайт не претендует на авторство размещенных материалов. Мы только конвертируем в удобный формат материалы из сети Интернет, которые находятся в открытом доступе и присланные нашими посетителями.
Если вы являетесь обладателем авторского права на любой размещенный у нас материал и намерены удалить его или получить ссылки на место коммерческого размещения материалов, обратитесь для согласования к администратору сайта.
Разрешается копировать материалы с обязательной гипертекстовой ссылкой на сайт, будьте благодарными мы затратили много усилий чтобы привести информацию в удобный вид.
© 2014-2021 Все права на дизайн сайта принадлежат С.Є.А.
Источник
iSopromat.ru

Рассмотрим три существующих способа задания движения материальной точки: координатный, векторный и естественный.
Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения.
В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки: векторный, координатный и естественный.
Векторный
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.

Координатный
При координатном способе задания движения задаются координаты точки как функции времени:
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t.
Естественный
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Кинематика. Задание положения точки.
Положение точки в пространстве можно задать двумя способами: координатным и векторным.
При задании движения координатным способом с телом отсчета связывают какую-либо систему координат, например, декартовую. Движение точки М будет задано в том случае, если ее координаты будут известны, как функции времени:


Эти зависимости называются уравнениями движения точки в декартовых координатах. Они выражают текущие координаты движущейся точки в виде функций времени. Если точка движется, оставаясь все время в одной плоскости, можно ограничиться двумя уравнениями движения: x = x(t), y = y(t).
Векторный способ задания положения точки .

Допустим, М – движущаяся точка относительно тела отсчета А. В теле А в качестве точки отсчета выберем произвольную точку О и построим вектор  Этот вектор называется радиус-вектором точки М.
Этот вектор называется радиус-вектором точки М.
Радиус-вектор – это вектор, соединяющий начало отсчета с положением точки в любой момент времени.
Когда точка М движется, радиус-вектор  непрерывно изменяется во времени, поэтому существует некоторая вектор-функция времени
непрерывно изменяется во времени, поэтому существует некоторая вектор-функция времени  Зная эту функцию, для каждого времени t можно построить вектор
Зная эту функцию, для каждого времени t можно построить вектор  и тем самым найти положение движущейся точки в данный момент. Функция
и тем самым найти положение движущейся точки в данный момент. Функция  называется векторным законом (векторным уравнением) движения точки М.
называется векторным законом (векторным уравнением) движения точки М.

Точка задается радиус-вектором, если известны его длина (модуль) и направление в пространстве, другими словами – значения его проекций rx, ry, rz на оси координат OX, OY и OZ, или углы между радиус-вектором и осями координат. При рассмотрении движения на плоскости:
Здесь за  мы принимаем модуль радиус-вектора
мы принимаем модуль радиус-вектора  , а rx и ry являются его проекциями на оси координат, все три величины скалярны, x и y – координаты точки А.
, а rx и ry являются его проекциями на оси координат, все три величины скалярны, x и y – координаты точки А.
Из этих уравнений видно, что между координатным и векторным способами задания положения точки существует связь.
Источник



