
Классификация основных способов движения агрегатов
Под способом движения подразумевается закономерность движения агрегата по полю в процессе работы.
Способы движенияагрегатов классифицируют по следующим основным признакам:
— по характеру разбивки поля на загоны;
— по числу одновременно обрабатываемых загонов;
— по направлению рабочих ходов;
— по виду поворотов.
Используют и такие классификационные признаки, как направление поворотов МТАи др. Однако они не имеют существенного значения для решения основных задач кинематики агрегатов.
По характеру разбивки поля на загоны различают загонные (поле разбивают на отдельные загоны) и беззагонные (поле на загоны не разбивают) способы движения. В зависимости от числа одновременно обрабатываемых загонов возможны однозагонные и многозагонные способы.
Для расчета количественных показателей холостого хода МТА основное значение имеют классификации способов движения по направлению рабочих ходов и по виду поворотов.
Все способы движения МТАпо направлению рабочих ходов делят на три группы: гоновые,круговые и диагональные. При гоновых способах движения агрегат совершает рабочие ходы параллельно одной или двум сторонам загона с холостыми поворотами на обоих его концах.
При круговом способе движении МТАрабочие ходы совершаются вдоль всех четырех сторон загона без выключения рабочих органов, за исключением центра загона, где неизбежны несколько холостых петлевых поворотов. Различают круговые способы движения от периферии к центру (рис. 5ж) и, наоборот — от центра к периферии.
При диагональном способе движения рабочие ходы агрегата совершаются под острым или тупым углом к сторонам загона. При этом обработка загона может начинаться как от угла (рис. 5з), так и от диагонали поочередно с одной и другой стороны.
На основе различных сочетаний гоновых способов движения могут быть получены комбинированные способы. Например, на рис. 5д комбинированный способ движения получен на основе способов движения всвал и вразвал.
По виду поворота МТА все способы движенияделят на петлевыеи беспетлевые. Способ считают петлевым, если в процессе работы на загоне МТА совершает хотя бы одинпетлевой поворотв соответствии с рис. 4 (рис. 5, а, б, в, г, ж, з). При отсутствии петлевых поворотов способ движения МТА считается беспетлевым (рис. 5, д, в).
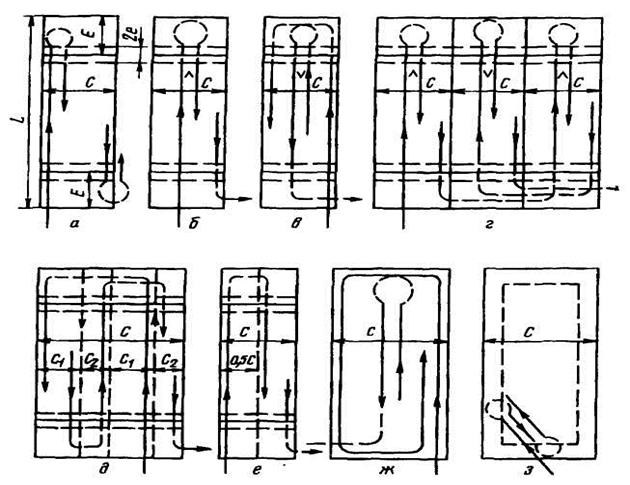
Рис. 5.Основные способы движения МТА: гоновые петлевые — челночный (а); всвал (б); вразвал (в); чередование способов всвал и вразвал (г); гоновые беспетлевые — комбинированный (д); перекрытием (е); круговой от периферии к центру (ж); диагональный (з). v — развальная борозда; а — свальный гребень
Источник
Способы движения агрегатов и их оценка
Различают три основных вида движения агрегатов (по направлению рабочих ходов относительно границ рабочего участка): гоновый (рабочие ходы вдоль одной из сторон участка), диагональный (под углом, диагонально к сторонам участка, разновидность — диагонально-перекрестный) и круговой (рабочий ход вдоль всех сторон участка или загона, различают круговое движение к центру или к периферии участка).
Круговые способы движения представлены на рисунке 8.4. Движение вкруговую выполняется чаще всего по свертывающейся спирали, от периферии к центру (рис. 8.4а), в этом случае не нужна разметка центральной части. Способ (рис. 8.4б) отличается наличием внутренних поворотных полос, которые либо готовятся заранее (прокашиваются, убираются), либо заделываются после обработки загона или участка. Способ (рис. 8.4в) — обработка от центра, в этом случае надо найти центр и разметить место и длину первого прохода.
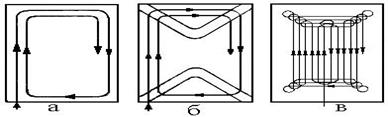
Рисунок 8.4 – Разновидности круговых способов движения:
а — при свертывающейся спирали без выключения рабочих органов и поворотных полос; б — то же, но с внутренними поворотными полосами; в — по развертывающейся спирали, конвертный способ
На рисунке 8.5 представлены диагональные способы движения для рабочих участков или загонов по форме близких к квадрату. Если загон имеет форму вытянутого прямоугольника, то он делится разбивкой на части, близкие к квадратной форме. Если здесь нужны поворотные полосы, то они отбиваются вдоль всех сторон участка.
|
На рисунке 8.6 представлены наиболее распространенные гоновые способы движения. Способ движения перекрытием беспетлевой, однако нуждается в частой разметке поля, лучше использовать при обработке уже размеченного поля (в виде рядков растений, когда надо просто отсчитать необходимое число рядков). Челночный способ движения однообразен и легок по выполнению. Способы движения всвал и вразвал наиболее распространены (чередованием по загонам) на вспашке. Их комбинированное использование на одном загоне позволяет получить беспетлевой способ движения при вспашке.
Различные способы движения агрегатов сравнивают по качеству выполнения технологической операции, удобству обслуживания, безопасности работы, затратам на подготовку рабочего участка. Все показатели тесно связаны с выполняемой работой, размерами рабочего участка, составом агрегата и его кинематическими характеристиками. Все это удобнее рассмотреть при изучении технологии выполнения отдельных сельскохозяйственных работ.
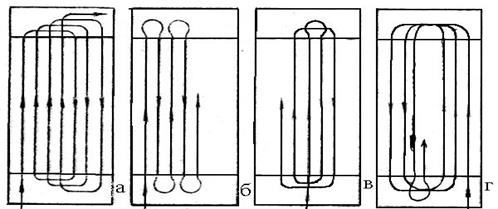
Рисунок 8.6 – Гоновые способы движения:
а — перекрытием; б — челночный; в — всвал; г — вразвал
Одной из главных оценок способов движения, влияющих на производительность агрегатов, является коэффициент рабочих ходов или степень использования пути
 , (8.6)
, (8.6)
где ΣLр и ΣLх — суммарная длина рабочих и холостых ходов на загоне; nр и nх — число рабочих и холостых проходов на загоне.
Для всех гоновых способов движения Lр=Lуч-2Е, а nр=nх=С/Вρ. В длину холостых ходов нужно включать не только длину пути на поворотах, но и дополнительные проходы, связанные с заделкой поворотных полос, проходы с неполной шириной захвата, заезды и переезды на рабочем участке.
При беспетлевых гоновых способах движения средняя длина холостого хода Lх.ср=1.14ρу+0.5С+2е и отсюда коэффициент рабочих ходов
 . (8.7)
. (8.7)
Для петлевых способов движения (всвал, вразвал) на участках шириной до 2ρу имеют место петлевые повороты, их число nпетл=2ρу/Вρ. Длина петлевых холостых ходов на загоне составила бы ΣLх петл=(2ρу/ Вρ)(6ρу+е). Если бы эти повороты выполнялись без петель (при ширине участка 2ρу), то их общая длина ΣLхбесп=(1.14ρу+2е+ρу)2ρу/Вρ. Тогда разница в длине холостого хода составит ΔLх=3.86ρу2ρуВρ≈ 8ρу 2 /Вρ. С учетом (8.6) и отнеся ΔLх к числу проходов nр=С/8ρу, получим коэффициент рабочих ходов для петлевых (всвал, вразвал) способов движения
 . (8.8)
. (8.8)
Для челночного способа движения все холостые ходы одинаковы Lх=6ρу+2е и коэффициент рабочих ходов
 . (8.9)
. (8.9)
Оптимальная (по производительности) ширина загона Сопт определяется из условия минимальной суммарной длины холостых или максимального коэффициента рабочих ходов на участке.
Суммарная длина холостых ходов на участке Sх.уч=ΣLх(Суч/С), тогда для петлевого способа движения с учетом (8.7)
 . (8.10)
. (8.10)
Возьмем первую производную для Sх уч по ширине загона С и приравняем ее нулю
 ,
,
 . (8.11)
. (8.11)
Минимальная (по возможности осуществления) ширина загона (Сmin) применима только к беспетлевым способам (например, способ движения перекрытием, комбинация всвал-вразвал). Беспетлевой поворот возможен только при Х≥2ρу, если загон будет содержать три или четыре таких минимальных делянки, то и минимальная ширина загона для беспетлевого способа движения будет равна шести или восьми условным радиусам поворота агрегата.
Для беспетлевых способов движения, как правило, расчетное значение Сопт меньше Сmin и, следовательно, физически не может быть осуществлено. Поэтому для беспетлевых способов Сопт обычно не рассчитывают, а принимают равным Сmin.
Коэффициент рабочих ходов для петлевых способов движения (С=Сопт) определяется по формуле
 , (8.12)
, (8.12)
а для беспетлевых способов движения (С=Сmin) равен
 . (8.13)
. (8.13)
При выборе того или иного способа движения надо исходить в первую очередь из агротехнических требований — качества работы, удобства обслуживания, возможности уменьшения вспомогательных операций и т.д. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который дает более высокое значение φ.
Наибольшее влияние на значение коэффициента рабочих ходов оказывает Lр. Чем больше радиус поворота ρу, тем меньше φ. Ширина загона С почти не оказывает влияния на φ при челночном способе движения. Отклонение от Сопт и Сmin в сторону увеличения с целью обеспечения целого числа проходов агрегата на загоне, удобства разбивки на загоны и т.д. не дает существенного уменьшения φ. В случае отклонения от Сопт в сторону уменьшения ширины загона величина φ снижается значительно.
Вопросы для самоконтроля знаний
1. Что понимается под кинематикой агрегата?
2. Перечислите кинематические характеристики МТА, дайте их характеристику.
3. Какие виды поворотов МТА Вы знаете?
4. Запишите формулу для расчета длины грушевидного поворота.
5. Запишите формулу для расчета минимальной ширины поворотной полосы для различных видов поворота.
6. Какие виды движения МТА Вы знаете?
7. Назовите способы движения МТА при гоновом виде движения.
8. Изобразите способы движения МТА «перекрытием», «челночный», «всвал» и « «вразвал».
9. Запишите формулу для расчета коэффициента рабочихходов МТА.
10. Запишите формулу для расчета оптимальной ширины загона для беспетлевого способа движения МТА.
Источник
Способы движения машинно-тракторных агрегатов




![]()
![]()
Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Успешное решение такой актуальной задачи зависит от конструктивных особенностей МТА, его маневренности, выбранного способа движения и соответствующей подготовки полей.
Под способом движения МТА подразумевается закономерность его перемещения по полю в процессе работы. Эта закономерность в основном определяется его геометрическими характеристиками: формой траектории; радиусом и видом поворота и т. д.
Подготовка полей в зависимости от выбранного способа движения предусматривает комплекс операций по разбивке поля на загоны требуемой формы и размера, обеспечивающие высокое качество технологического процесса и высокую производительность при возможно меньших затратах ресурсов.
Таким образом, основной задачей кинематики агрегатов является обоснование методов выбора эффективных способов движения МТА и подготовки полей с учетом следующих основных требований: высокое качество выполняемой работы; высокая производительность при возможно меньших затратах топлива и других ресурсов на единицу выполненной работы; обеспечение безопасных условий работы для механизаторов; наименьшее отрицательное воздействие на окружающую среду (почву, культурные растения и т. д.).
От уровня удовлетворения указанных требований значительно зависит реализация высоких потенциальных возможностей МТА, заложенных в процессе их оптимального комплектования.
При успешном решении задач кинематики агрегатов будет иметь место эффект сложения показателей ресурсосбережения, заложенных как при комплектовании МТА, так и при выборе способа его движения. В противном случае преимущества оптимальных агрегатов могут быть утеряны частично или полностью как по производительности, так и по ресурсосбережению, что свидетельствует об актуальности рассматриваемых вопросов.
Основные кинематические характеристики МТА зависят от конструктивных особенностей трактора, сцепки и рабочих машин. К таким характеристикам агрегата относятся: кинематический центр; кинематическая длина; длина выезда; кинематическая ширина; радиус и центр поворота; ширина колеи и продольная база трактора; ширина захвата.
Под кинематическим центром агрегата (рис. 3) подразумевается условная геометрическая точка на плоскости движения (поверхности поля), траектория которой рассматривается как траектория МТА в процессе движения по полю. Такое упрощение приемлемо в связи с тем, что геометрические размеры МТА неизмеримо меньше размеров обрабатываемого участка или загона. Расположение центра агрегата зависит от типа трактора.
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка центра определяется как проекция середины задней ведущей оси трактора на плоскость движения (рис. 3, а). У агрегатов с тракторами, имеющими шарнирно-сочлененную раму, за центр агрегата принимается проекция на плоскость движения центра шарнира (рис. 3, б). Для МТА с гусеничными тракторами центр агрегата соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных через наружные края гусениц (рис. 3, в).

 Рисунок 3. Основные схемы расположения центра агрегата
Рисунок 3. Основные схемы расположения центра агрегата
При решении задач кинематики траектория центра агрегата условно принимается как траектория всего агрегата.
Кинематической длиной агрегата называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении.
Основные кинематические характеристики рабочего участка: общая  и рабочая
и рабочая  длины гона; ширина
длины гона; ширина  загона; ширина
загона; ширина  поворотной полосы; длина
поворотной полосы; длина  выезда (рис. 4).
выезда (рис. 4).
 Рисунок 4. Основные кинематические характеристики рабочего участка
Рисунок 4. Основные кинематические характеристики рабочего участка

Под рабочим участком подразумевается часть поля, отведенная для выполнения определенной сельскохозяйственной операции. Загон представляет собой часть рабочего участка прямоугольной формы, отведенную для работы на ней одного или группы агрегатов.
Длина гона часто определяется размерами поля, а ширина загона — шириной захвата и способом движения МТА. Ширина поворотной полосы зависит от ширины захвата и условий безопасного поворота агрегата. Рабочая длина гона  . По соображениям удобства в качестве расчетной используется общая длина гона .
. По соображениям удобства в качестве расчетной используется общая длина гона .
Движение МТА в процессе работы часто состоит из прямолинейных рабочих ходов вдоль гона и поворотов на конце гона. При этом в зависимости от типа агрегата повороты могут совершаться как с включенными, так и выключенными рабочими органами (во втором случае происходит холостой поворот).
С учетом большого влияния вида поворота на показатели работы МТА необходимо при его выборе учитывать следующие основные требования: высокое качество выполняемой работы; возможно меньшая ширина поворотной полосы; высокая производительность МТА при наименьших потерях времени, топлива и других ресурсов; обеспечение безопасных условий работы; возможно меньшее отрицательное воздействие на окружающую среду, особенно на почву.
 Рисунок 5. Основные виды поворотов МТА: беспетлевые – круговой (1); с
Рисунок 5. Основные виды поворотов МТА: беспетлевые – круговой (1); с
прямолинейным участком (2); угловой (3); петлевые – закрытая петля (4);
грушевидный (5); односторонний (6); грибовидный.
Все повороты основных видов для удобства изучения делят на две группы: петлевые и беспетлевые. В пределах каждой группы дополнительно различают способы поворота по углу поворота МТА.
Важнейшие кинематические характеристики всех поворотов: длина  , время
, время  , радиус
, радиус  , требуемая ширина поворотной полосы.
, требуемая ширина поворотной полосы.
Под способом движения подразумевается закономерность движения агрегата по полю в процессе работы.
Способы движения агрегатов классифицируют по следующим основным признакам: по характеру разбивки поля на загоны; по числу одновременно обрабатываемых загонов; по направлению рабочих ходов; по виду поворотов. Используют и такие классификационные признаки, как направление поворотов МТА и др.; однако они не имеют существенного значения для решения основных задач кинематики агрегатов.
По характеру разбивки поля на загоны различают загонные (поле разбивают на отдельные загоны) и беззагонные (поле на загоны не разбивают) способы движения. В зависимости от числа одновременно обрабатываемых загонов возможны одно- и многозагонные способы.
Для расчета количественных показателей холостого хода МТА основное значение имеют классификации способов движения по направлению рабочих ходов и по виду поворотов.
Все способы движения МТА по направлению рабочих ходов делят на три группы: гоновые, круговые, диагональные. При гоновых способах движения агрегат совершает рабочие ходы параллельно одной или двум сторонам загона с холостыми поворотами на обоих его концах.
При круговом способе движении МТА рабочие ходы совершаются вдоль всех четырех сторон загона без выключения рабочих органов, за исключением центра загона, где неизбежны несколько холостых петлевых поворотов. Различают круговые способы движения от периферии к центру и, наоборот, от центра к периферии.
При диагональном способе движения рабочие ходы агрегата совершаются под острым или тупым углом к сторонам загона. При этом обработка загона может начинаться как от угла, так и от диагонали поочередно с одной и другой стороны.
На основе различных сочетаний гоновых способов движения могут быть получены комбинированные способы. Способ считают петлевым, если в процессе работы на загоне МТА совершает хотя бы один петлевой поворот. При отсутствии петлевых поворотов способ движения МТА считается беспетлевым.
Один из важнейших способов уменьшения непроизводительных потерь времени и топлива при холостом ходе МТА — предварительная разбивка полей на загоны оптимальной ширины с одновременной отбивкой поворотных полос. Для этой цели желательно иметь специальные агрегаты сравнительно небольшой мощности, обеспечивающие прокладку прямолинейных борозд и отбивку загонов прямоугольной формы.
Указанные агрегаты должны выполнять также другие вспомогательные операции, связанные с заравниванием свальных гребней и развальных борозд, обработкой поворотных полос и т. д. При этом более мощные МТА освобождаются от выполнения вспомогательных операций и их производительность существенно возрастает при более высоком качестве работы. Важное значение имеет также придание полям прямоугольной формы при одновременном удалении препятствий (камней, кустов деревьев, столбов и т.д.).
Источник



