
Диагонально угловой способ движения
Пахота. Желательно направлять агрегат поперек предыдущей пахоты или склона (в целях борьбы с водной эрозией почвы).
Перед началом работы поле должно быть разбито на отдельные загонки С (рис. 61, а), которые следует обрабатывать так, чтобы чередовалась вспашка «всвал» и «вразвал». При этом важно правильно определить размеры загонок, так как при малой их ширине на поле будет большое количество свальных гребней и разъемных борозд, а при большой ширине будет затрачиваться много времени на холостые переезды (повороты) агрегата, что, в свою очередь, снижает выработку.
Рекламные предложения на основе ваших интересов:
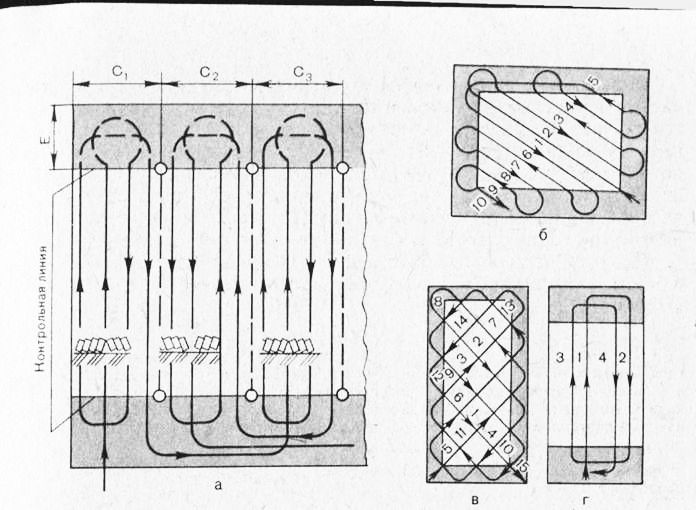
Рис. 61. Способы движения тракторных агрегатов:
а — челночный; б — диагональный; в — диагонально-перекрестный; г — с перекрытием: I… 15 — последовательность движения агрегата; Си Сг и Сз — загонки; Е — поворотная полоса.
В зависимости от длины гона и состава агрегата рекомендуются следующие ширины загонок С.
Сплошная культивация. Первую культивацию проводят поперек направления вспашки или под углом к ней, а повторную — поперек предыдущим культивациям. Предпосевная обработка не должна совпадать с направлением посева. Основной способ движения агрегата челночный (рис. 61, а), кроме того, можно обрабатывать диагонально-перекрестным (рис. 61, в). Широкозахватные агрегаты с прицепными универсальными сцепками следует вести по схеме с «перекрытием» (рис. 61, г).
Боронование. Предпосевное боронование проводят поперек или под углом к предполагаемому направлению посева, а вспаханное поле обрабатывают поперек или под углом к направлению вспашки. Рядковые посевы боронуют поперек к направлению рядков растений, а перекрестные — под острым углом к направлению рядков по диагонали (рис. 61, б). Основной способ движения — челночный. На полях квадратной или прямоугольной формы можно применять диагонально-перекрестный способ, а на полях небольших размеров, если выезд за пределы поля ограничен, — вкруговую.
Посев зерновых колосовых и зернобобовых культур. Направление посева определяют до предпосевной обработки поля. Его следует устанавливать под углом к направлению предполагаемой обработки. Желательно, чтобы длина гона при посеве была наибольшей. На склонах следует сеять поперек направления склона.
Основной способ движения — челночный, возможно применение диагонально-перекрестного. Диагонально-перекрестный и перекрестный посевы следует проводить на полях, площадь которых позволяет завершить посев за 2…3 дня. Диагонально-перекрестный способ посева нужно использовать только на полях квадратной формы.
Посев и посадка пропашных культур. Направление посева или посадки также необходимо определить до выполнения предпосевной обработки поля, направление которой должно быть выбрано под углом или поперек будущего посева или посадки. Квадратно-гнездовой способ нужно вести вдоль склона поля. Пунктирный посев на участках, подверженных действию эрозии почвы, выполняют поперек склона. Основным способом движения считается челночный.
Снегозадержание. Направление валов снега должно быть перпендикулярно направлению господствующих ветров, а также поперек склонов.
Наилучший способ движения — вкруговую по раскручивающейся спирали от центров участков прямоугольной формы, на которые должно быть разбито поле.
Источник
Способы движения агрегатов и их оценка
Различают три основных вида движения агрегатов (по направлению рабочих ходов относительно границ рабочего участка): гоновый (рабочие ходы вдоль одной из сторон участка), диагональный (под углом, диагонально к сторонам участка, разновидность — диагонально-перекрестный) и круговой (рабочий ход вдоль всех сторон участка или загона, различают круговое движение к центру или к периферии участка).
Круговые способы движения представлены на рисунке 8.4. Движение вкруговую выполняется чаще всего по свертывающейся спирали, от периферии к центру (рис. 8.4а), в этом случае не нужна разметка центральной части. Способ (рис. 8.4б) отличается наличием внутренних поворотных полос, которые либо готовятся заранее (прокашиваются, убираются), либо заделываются после обработки загона или участка. Способ (рис. 8.4в) — обработка от центра, в этом случае надо найти центр и разметить место и длину первого прохода.
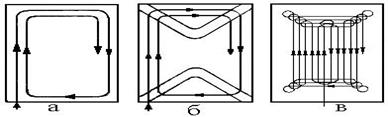
Рисунок 8.4 – Разновидности круговых способов движения:
а — при свертывающейся спирали без выключения рабочих органов и поворотных полос; б — то же, но с внутренними поворотными полосами; в — по развертывающейся спирали, конвертный способ
На рисунке 8.5 представлены диагональные способы движения для рабочих участков или загонов по форме близких к квадрату. Если загон имеет форму вытянутого прямоугольника, то он делится разбивкой на части, близкие к квадратной форме. Если здесь нужны поворотные полосы, то они отбиваются вдоль всех сторон участка.
|
На рисунке 8.6 представлены наиболее распространенные гоновые способы движения. Способ движения перекрытием беспетлевой, однако нуждается в частой разметке поля, лучше использовать при обработке уже размеченного поля (в виде рядков растений, когда надо просто отсчитать необходимое число рядков). Челночный способ движения однообразен и легок по выполнению. Способы движения всвал и вразвал наиболее распространены (чередованием по загонам) на вспашке. Их комбинированное использование на одном загоне позволяет получить беспетлевой способ движения при вспашке.
Различные способы движения агрегатов сравнивают по качеству выполнения технологической операции, удобству обслуживания, безопасности работы, затратам на подготовку рабочего участка. Все показатели тесно связаны с выполняемой работой, размерами рабочего участка, составом агрегата и его кинематическими характеристиками. Все это удобнее рассмотреть при изучении технологии выполнения отдельных сельскохозяйственных работ.
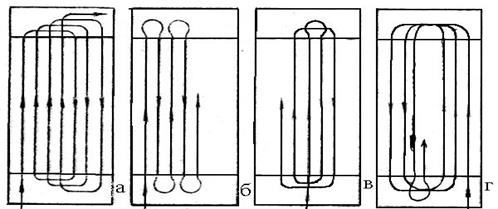
Рисунок 8.6 – Гоновые способы движения:
а — перекрытием; б — челночный; в — всвал; г — вразвал
Одной из главных оценок способов движения, влияющих на производительность агрегатов, является коэффициент рабочих ходов или степень использования пути
 , (8.6)
, (8.6)
где ΣLр и ΣLх — суммарная длина рабочих и холостых ходов на загоне; nр и nх — число рабочих и холостых проходов на загоне.
Для всех гоновых способов движения Lр=Lуч-2Е, а nр=nх=С/Вρ. В длину холостых ходов нужно включать не только длину пути на поворотах, но и дополнительные проходы, связанные с заделкой поворотных полос, проходы с неполной шириной захвата, заезды и переезды на рабочем участке.
При беспетлевых гоновых способах движения средняя длина холостого хода Lх.ср=1.14ρу+0.5С+2е и отсюда коэффициент рабочих ходов
 . (8.7)
. (8.7)
Для петлевых способов движения (всвал, вразвал) на участках шириной до 2ρу имеют место петлевые повороты, их число nпетл=2ρу/Вρ. Длина петлевых холостых ходов на загоне составила бы ΣLх петл=(2ρу/ Вρ)(6ρу+е). Если бы эти повороты выполнялись без петель (при ширине участка 2ρу), то их общая длина ΣLхбесп=(1.14ρу+2е+ρу)2ρу/Вρ. Тогда разница в длине холостого хода составит ΔLх=3.86ρу2ρуВρ≈ 8ρу 2 /Вρ. С учетом (8.6) и отнеся ΔLх к числу проходов nр=С/8ρу, получим коэффициент рабочих ходов для петлевых (всвал, вразвал) способов движения
 . (8.8)
. (8.8)
Для челночного способа движения все холостые ходы одинаковы Lх=6ρу+2е и коэффициент рабочих ходов
 . (8.9)
. (8.9)
Оптимальная (по производительности) ширина загона Сопт определяется из условия минимальной суммарной длины холостых или максимального коэффициента рабочих ходов на участке.
Суммарная длина холостых ходов на участке Sх.уч=ΣLх(Суч/С), тогда для петлевого способа движения с учетом (8.7)
 . (8.10)
. (8.10)
Возьмем первую производную для Sх уч по ширине загона С и приравняем ее нулю
 ,
,
 . (8.11)
. (8.11)
Минимальная (по возможности осуществления) ширина загона (Сmin) применима только к беспетлевым способам (например, способ движения перекрытием, комбинация всвал-вразвал). Беспетлевой поворот возможен только при Х≥2ρу, если загон будет содержать три или четыре таких минимальных делянки, то и минимальная ширина загона для беспетлевого способа движения будет равна шести или восьми условным радиусам поворота агрегата.
Для беспетлевых способов движения, как правило, расчетное значение Сопт меньше Сmin и, следовательно, физически не может быть осуществлено. Поэтому для беспетлевых способов Сопт обычно не рассчитывают, а принимают равным Сmin.
Коэффициент рабочих ходов для петлевых способов движения (С=Сопт) определяется по формуле
 , (8.12)
, (8.12)
а для беспетлевых способов движения (С=Сmin) равен
 . (8.13)
. (8.13)
При выборе того или иного способа движения надо исходить в первую очередь из агротехнических требований — качества работы, удобства обслуживания, возможности уменьшения вспомогательных операций и т.д. Если эти условия позволяют применять различные способы движения, следует выбирать тот, который дает более высокое значение φ.
Наибольшее влияние на значение коэффициента рабочих ходов оказывает Lр. Чем больше радиус поворота ρу, тем меньше φ. Ширина загона С почти не оказывает влияния на φ при челночном способе движения. Отклонение от Сопт и Сmin в сторону увеличения с целью обеспечения целого числа проходов агрегата на загоне, удобства разбивки на загоны и т.д. не дает существенного уменьшения φ. В случае отклонения от Сопт в сторону уменьшения ширины загона величина φ снижается значительно.
Вопросы для самоконтроля знаний
1. Что понимается под кинематикой агрегата?
2. Перечислите кинематические характеристики МТА, дайте их характеристику.
3. Какие виды поворотов МТА Вы знаете?
4. Запишите формулу для расчета длины грушевидного поворота.
5. Запишите формулу для расчета минимальной ширины поворотной полосы для различных видов поворота.
6. Какие виды движения МТА Вы знаете?
7. Назовите способы движения МТА при гоновом виде движения.
8. Изобразите способы движения МТА «перекрытием», «челночный», «всвал» и « «вразвал».
9. Запишите формулу для расчета коэффициента рабочихходов МТА.
10. Запишите формулу для расчета оптимальной ширины загона для беспетлевого способа движения МТА.
Источник
Классификация основных способов движения агрегатов
Под способом движения подразумевается закономерность движения агрегата по полю в процессе работы.
Способы движенияагрегатов классифицируют по следующим основным признакам:
— по характеру разбивки поля на загоны;
— по числу одновременно обрабатываемых загонов;
— по направлению рабочих ходов;
— по виду поворотов.
Используют и такие классификационные признаки, как направление поворотов МТАи др. Однако они не имеют существенного значения для решения основных задач кинематики агрегатов.
По характеру разбивки поля на загоны различают загонные (поле разбивают на отдельные загоны) и беззагонные (поле на загоны не разбивают) способы движения. В зависимости от числа одновременно обрабатываемых загонов возможны однозагонные и многозагонные способы.
Для расчета количественных показателей холостого хода МТА основное значение имеют классификации способов движения по направлению рабочих ходов и по виду поворотов.
Все способы движения МТАпо направлению рабочих ходов делят на три группы: гоновые,круговые и диагональные. При гоновых способах движения агрегат совершает рабочие ходы параллельно одной или двум сторонам загона с холостыми поворотами на обоих его концах.
При круговом способе движении МТАрабочие ходы совершаются вдоль всех четырех сторон загона без выключения рабочих органов, за исключением центра загона, где неизбежны несколько холостых петлевых поворотов. Различают круговые способы движения от периферии к центру (рис. 5ж) и, наоборот — от центра к периферии.
При диагональном способе движения рабочие ходы агрегата совершаются под острым или тупым углом к сторонам загона. При этом обработка загона может начинаться как от угла (рис. 5з), так и от диагонали поочередно с одной и другой стороны.
На основе различных сочетаний гоновых способов движения могут быть получены комбинированные способы. Например, на рис. 5д комбинированный способ движения получен на основе способов движения всвал и вразвал.
По виду поворота МТА все способы движенияделят на петлевыеи беспетлевые. Способ считают петлевым, если в процессе работы на загоне МТА совершает хотя бы одинпетлевой поворотв соответствии с рис. 4 (рис. 5, а, б, в, г, ж, з). При отсутствии петлевых поворотов способ движения МТА считается беспетлевым (рис. 5, д, в).
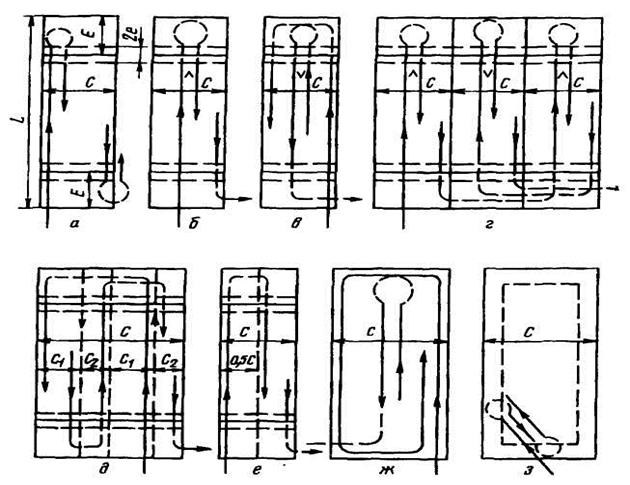
Рис. 5.Основные способы движения МТА: гоновые петлевые — челночный (а); всвал (б); вразвал (в); чередование способов всвал и вразвал (г); гоновые беспетлевые — комбинированный (д); перекрытием (е); круговой от периферии к центру (ж); диагональный (з). v — развальная борозда; а — свальный гребень
Источник



