
- iSopromat.ru
- Декартовый способ задания движения точки
- Координатный способ задания движения точки
- Введение
- Определение кинематических величин
- Пример решения задачи
- Определение скорости и ускорения точки по заданным уравнениям ее движения
- Решение
- Определение вида траектории
- Определение скорости точки
- Определение ускорения точки
- Определение остальных величин
- 1.2 Координатный способ задания движения точки (Прямоугольные декартовы координаты)
- Решение
iSopromat.ru

При координатном способе задания движения точки в выбранной системе координат задаются координаты движущейся точки как функции от времени.
В прямоугольной декартовой системе координат это будут уравнения:
Эти уравнения являются и уравнениями траектории в параметрической форме. Исключая из этих уравнений параметр t, можно получить три пары систем двух уравнений, каждая из которых представляет траекторию точки, как пересечение поверхностей.
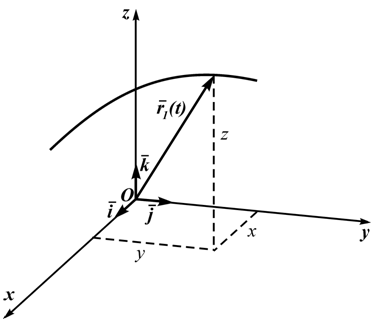
Кроме декартовых могут быть использованы другие системы координат (сферическая, цилиндрическая). Всегда можно перейти от координатного способа задания движения к векторному (рисунок 1.3):
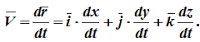
Поэтому, используя формулы для определения скорости и ускорения точки при векторном способе задания движения, можно получить аналогичные формулы для координатного способа:
Направление вектора скорости определяется с помощью направляющих косинусов:
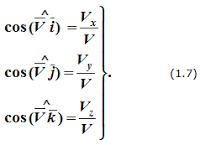
Формулы (1.6) и (1.7) полностью определяют вектор скорости при координатном способе задания движения точки, т.е. по величине и направлению.
Аналогичны формулы для определения ускорения точки:
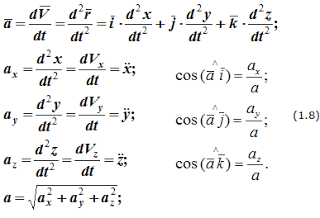
Формулы (1.8) определяют величину и направление вектора ускорения. В формулах (1.6) и (1.8) приведены используемые в различных учебниках обозначения проекций скоростей и ускорений точек на оси декартовой системы координат.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Декартовый способ задания движения точки
Движение. Виды движений. Описание движения. Система отсчета.
Механическим движением тела (точки) называется изменение его положения в пространстве относительно других тел с течением времени.
А) Равномерное прямолинейное движение материальной точки.
Б) Равноускоренное прямолинейное движение материальной точки.
В) Движение тела по дуге окружности с постоянной по модулю скоростью.
Г) Гармоническое колебательное движение. Важным случаем механического движения являются колебания, при которых параметры движения точки (координаты, скорость, ускорение) повторяются через определенные промежутки времени.
1. Векторный способ описания движения
ОПРЕДЕЛЕНИЕ: Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
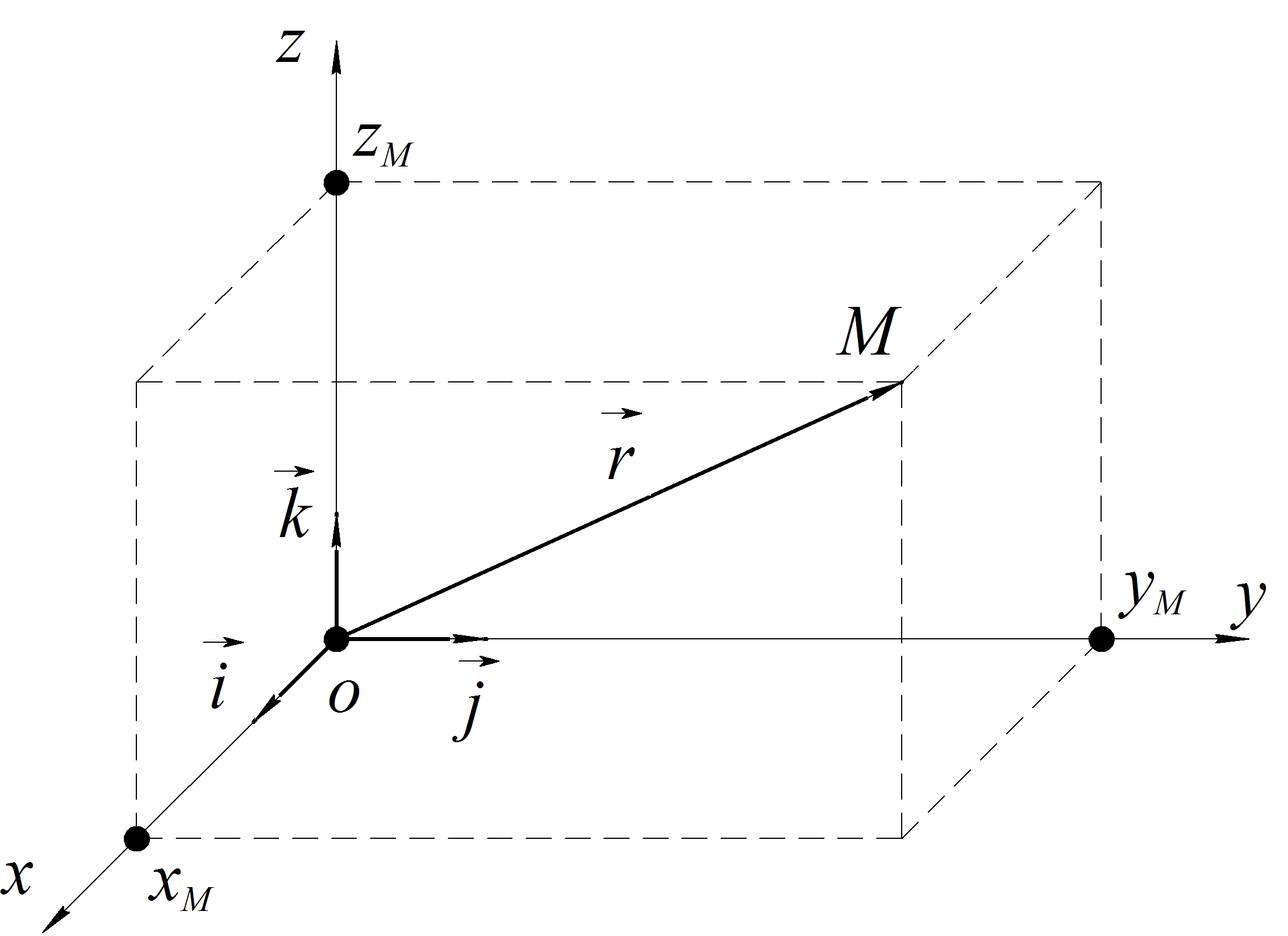
Рассмотрим движение точки М в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r = r ( t ) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение s точки.

2. Координатный способ описания движения
ОПРЕДЕЛЕНИЕ: Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.

В декартовой системе координат положение точки определяется тройкой чисел ( x , y , z ) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: x = x ( t ), y = y ( t ), z = z ( t )
Между векторным и координатным способом описания движения существует непосредственная связь, а именно: числовые значения проекций радиус-вектора движущейся точки на координатные оси системы с тем же началом отсчета равны координатам точки: rx = x , ry = y , rz = z .
3. Естественный способ описания движения
ОПРЕДЕЛЕНИЕ: Естественный способ описания движения – описание движения вдоль траектории. Этим способом пользуются, когда траектория точки заранее известна.
Пусть точка М движется вдоль траектории АВ в системе отсчета Oxyz (рис.3). Выберем на траектории какую-нибудь неподвижную точку О 1 , которую будем считать началом отсчета, и определим положительное и отрицательное направления. Тогда положение точки M будет определяться расстоянием S от точки О 1 . При движении точка М переместится в точку М 1 , соответственно изменится ее расстояние от точки О 1 . Таким образом, расстояние S зависит от времени, а характер этой зависимости позволит определить положение точки М на траектории в любой момент времени. Закон движения в этом случае имеет вид: s = s ( t ) .



Под системой отсчета понимают тело отсчета, которое условно считается неподвижным, систему координат, связанную с телом отсчета, и часы, также связанные с телом отсчета. В кинематике система отсчета выбирается в соответствии с конкретными условиями задачи описания движения тела.
Источник
Координатный способ задания движения точки
Введение
Выводы приведенных ниже формул и изложение теории приводится на странице “Кинематика материальной точки”. Здесь мы применим основные результаты этой теории к координатному способу задания движения материальной точки.
Пусть мы имеем неподвижную прямоугольную систему координат с центром в неподвижной точке . При этом положение точки M однозначно определяются ее координатами (x, y, z). Координатный способ задания движения точки – это такой способ, при котором заданы зависимости координат от времени. То есть заданы три функции от времени (при трехмерном движении):
Далее мы приводим формулы вычисления кинематических величин и пример решения задачи для координатного способа задания движения.
Определение кинематических величин
Зная зависимости координат от времени , мы автоматически определяем радиус-вектор материальной точки M по формуле:
,
где – единичные векторы (орты) в направлении осей x, y, z .
Дифференцируя по времени , находим проекции скорости и ускорения на оси координат:
;
;
Модули скорости и ускорения:
;
.
Единичный вектор в направлении касательной к траектории:
.
Его можно определить двумя способами – по направлению скорости, или в противоположную сторону. Поэтому здесь в знаменателе стоит не модуль скорости, а алгебраическая величина скорости, которая, по абсолютной величине, равна модулю скорости, но может принимать как положительные, так и отрицательные значения: . Она является проекцией скорости на направление единичного вектора .
Алгебраическая величина тангенциального (касательного) ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории:
.
Вектор тангенциального (касательного) ускорения:
.
Здесь также, как и для скорости, – это скалярная величина, которая может принимать как положительные так и отрицательные значения: .
Нормальное ускорение:
.
Вектор нормального ускорения:
; .
Единичный вектор в направлении главной нормали траектории (то есть единичный вектор, перпендикулярный касательной и направленный к центру кривизны траектории):
.
Здесь – это модуль нормального ускорения: . Нормальное ускорение всегда направлено к центру кривизны траектории. Оно не может быть направлено в противоположную сторону.
Радиус кривизны траектории:
.
Центр кривизны траектории:
.
Единичный вектор в направлении бинормали:
.
Пример решения задачи
Определение скорости и ускорения точки по заданным уравнениям ее движения
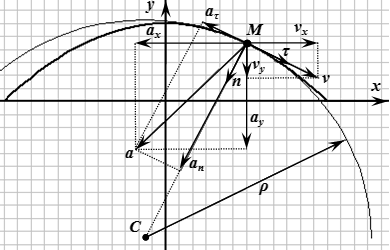
По заданным уравнениям движения точки установить вид ее траектории и для момента времени найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Уравнения движения точки:
, см;
, см.
Решение
Определение вида траектории
Исключаем время из уравнений движения. Для этого перепишем их в виде:
; .
Применим формулу:
.
;
;
;
.
Итак, мы получили уравнение траектории:
.
Это уравнение параболы с вершиной в точке и осью симметрии .
Поскольку
, то
; или
.
Аналогичным образом получаем ограничение для координаты :
;
;
Таким образом, траекторией движения точки является дуга параболы
,
расположенная при
и .
Строим параболу по точкам.
| 0 | 6 |
| ± 3 | 5,625 |
| ± 6 | 4,5 |
| ± 9 | 2,625 |
| ± 12 | 0 |
Определяем положение точки в момент времени .
;
.
Определение скорости точки
Дифференцируя координаты и по времени , находим компоненты скорости.
.
Чтобы продифференцировать , удобно применить формулу тригонометрии:
. Тогда
;
.
Вычисляем значения компонент скорости в момент времени :
;
.
Модуль скорости:
.
Определение ускорения точки
Дифференцируя компоненты скорости и по времени , находим компоненты ускорения точки.
;
.
Вычисляем значения компонент ускорения в момент времени :
;
.
Модуль ускорения:
.
Алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории. Выберем направление совпадающим с направлением скорости . Тогда ; алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление скорости :
.
Поскольку , то вектор тангенциального ускорения направлен противоположно скорости .
Нормальное ускорение:
.
Вектор и направлен в сторону центра кривизны траектории.
Радиус кривизны траектории:
.
Траекторией движения точки является дуга параболы
; .
Скорость точки: .
Ускорение точки: ; ; .
Радиус кривизны траектории: .
Определение остальных величин
При решении задачи мы нашли:
вектор и модуль скорости:
; ;
вектор и модуль полного ускорения:
; ;
тангенциальное и нормальное ускорения:
; ;
радиус кривизны траектории: .
Определим остальные величины.
Единичный вектор в направлении касательной к траектории:
.
Вектор тангенциального ускорения:
.
Вектор нормального ускорения:
.
Единичный вектор в направлении главной нормали:
.
Координаты центра кривизны траектории:
.
Введем третью ось системы координат перпендикулярно осям и . В трехмерной системе
; .
Единичный вектор в направлении бинормали:
.
Автор: Олег Одинцов . Опубликовано: 22-02-2016 Изменено: 29-01-2020
Источник
1.2 Координатный способ задания движения точки (Прямоугольные декартовы координаты)
Пусть OXYZ– неподвижная декартова система координат. Положение точки в системе координатOXYZопределяется тремя координатами:x,y,z(Рис.8).
При движении точки М меняются её координаты, то есть они являются функциями времени.
Уравнениями движения точки в прямоугольных декартовых координатах называется зависимость координат точки от времени, которые однозначно определяют положение точки в любой момент времени, то есть задают ее движение:

Если движение точки происходит все время в одной и той же плоскости, то приняв эту плоскость, например, за плоскость Оxy, получим в этом случае два уравнения движения:

При прямолинейном движении точки, если вдоль ее траектории направить одну из координатных осей, (например Ох), движение точки будет определяться одним уравнением (законом прямолинейного движения точки)
При введении единичных векторов  (ортов декартовой системы координат), можно записать выражение для радиус-вектора движущейся материальной точки и получить связь между векторным и координатным способами задания движения точки:
(ортов декартовой системы координат), можно записать выражение для радиус-вектора движущейся материальной точки и получить связь между векторным и координатным способами задания движения точки:

б) Траектория и её уравнение
Уравнения движения точки являются также и уравнениями траектории точки, заданными параметрически. Для получения явного вида уравнения траектории, то есть уравнения той кривой, которая целиком или в некоторой ее части является траекторией точки, следует из уравнений движения исключить время.
По заданным уравнениям движения точки в плоскости OXY (1 – 7)
x = x(t), y = y(t). найти уравнение ее траектории в координатной форме (x.y – в сантиметрах, t – в секундах):
x = 5 cos ωt; y = 2+5 sin ωt;
x = 3 sin ωt; y = 5 cos ωt
x = (t + 1);  ;
;

Решение
Для получения уравнения траектории исключим время из уравнений движения:
1. Из первого уравнения определяем время:

Подставив во второе, получим:

Полученное уравнение есть уравнение прямой.
2. Из первого уравнения определяем время:

Подставив во второе, получим:

Полученное уравнение – уравнение квадратной параболы.
3. Из первого уравнения определяем время — t=(x-4)/2. Это значение подставим во второе уравнение и получим уравнение траектории в виде уравнения кубической параболы:

4. Поскольку время — t входит в аргументы тригонометрических функций,то используем основное тригонометрическое тождество:

 ;
;
 ;
;
Возведём в квадрат обе части и складывая получим:
Полученное уравнение – уравнение окружности с центром в точке
5. Решение аналогично пункту 3.

Полученное уравнение – уравнение эллипса.
6. Преобразуем второе уравнение:
 ,
,
Подставив полученное значение х, получим:

Полученное уравнение – уравнение гиперболы.
7. Поскольку t входит в аргументы тригонометрических функций,где один аргумент вдвое больше другого, используем формулу:
сos 2α = 1 – 2 sin 2 α;



Тогда уравнение примет вид:

Из второго уравнения:

8. Возведем в квадрат обе части заданных уравнений движения, получим:

Вычтем из первого уравнение второе, получим:

Полученное уравнение – уравнение равнобочной гиперболы.
Определение вектора скорости при координатном способе задания движения точки сводится к нахождению проекций скорости на координатные оси x, y, z.
По определению скорости:

Это равенство продифференцируем по времени, учитывая, что единичные орты не изменяются по величине и направлениям, то есть эти векторы постоянны. Получим:

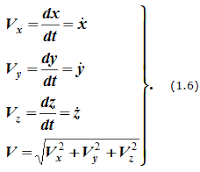
Отсюда находим проекции вектора скорости на оси декартовой системы координат:

Проекции скорости точки на оси координат равны первым производным соответствующих координат точки по времени.Знак производных показывает направление проекций скоростей по отношению к соответствующим осям.
показывает направление проекций скоростей по отношению к соответствующим осям.
Алгебраическое значение вектора скорости(модуль вектора скорости) вычисляется по формуле:

г) Направление скоростиопределяется через направляющие косинусы:

Только при равномерном прямолинейном движении точки ее скорость сохраняет свое численное значение и направление. При неравномерном криволинейном движении скорость точки изменяется по модулю и направлению. Определение вектора ускорения при координатном способе задания движения точки сводится к нахождению проекций ускорения на координатные оси x, y, z.


где: проекции ускорения на координатные оси x, y, z:
Проекции ускорения точки на оси координат равны вторым производным соответствующих координат точки по времени или первым производным по времени от проекций вектора скорости.Знак производных показывает направление проекций ускорений по отношению к соответствующим осям.
показывает направление проекций ускорений по отношению к соответствующим осям.
По известным проекциям на оси координат находим модуль ускорения:
ё) Направление ускоренияопределяется через направляющие косинусы:
ж) Прямолинейное движение точки. Прямая и обратная задачи
1. Задача называется прямой, если задано уравнение прямолинейного движения точкиx=x(t)и требуется вычислить скорость и ускорение точки.
Пример 8 Решение прямой задачи
Прямолинейное движение точки задано уравнением x=5sin(t).Вычислить скорость и ускорение точки в момент времени c.
c.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник



