
Стабилизация управляемых колёс.




![]()
![]()
Стабилизацией управляемых колёс называется их свойство сохранять положение, отвечающее прямолинейному движению, и автоматически возвращаться в это положение.
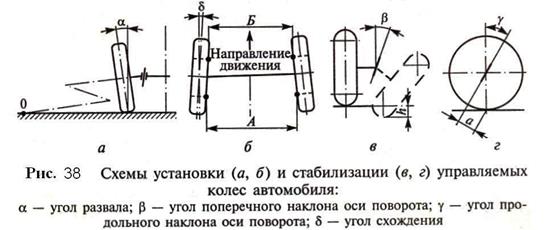
На автомобилях стабилизация управляемых колёс обеспечивается наклоном шкворня или оси поворота колёс в поперечной и продольной плоскостях и упругими свойствами пневматической шины, которые создают соответственно весовой, скоростной и упругий стабилизирующие моменты.
Весовой стабилизирующий момент возникает вследствие поперечного наклона шкворня или оси поворота управляемого колеса (при бесшкворневой подвеске). Он не зависит ни от скорости движения, ни от сцепления колеса с дорогой. Угол поперечного наклона шкворня составляет 5 -10 0 . При увеличении угла повышается стабилизация управляемых колёс, но затрудняется работа водителя.
Скоростной стабилизирующий момент создаётся в результате продольного наклона шкворня. Угол продольного наклона составляет 0 – 3,5 0 . При увеличении угла повышается стабилизация управляемых колёс, но усложняется работа водителя.
Упругий стабилизирующий момент шины создаётся при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки. Стабилизирующий момент шины достигает значительной величины у легковых автомобилей, которые имеют высокоэластичные шины и движутся с большой скоростью. При очень эластичных шинах угол продольного наклона шкворня делают равным нулю, чтобы не усложнять управление автомобилем. Упругий стабилизирующий момент шины резко уменьшается на скользких, обледенелых дорогах.
Источник
Устройство автомобилей
Стабилизация управляемых колес
Устойчивость движения автомобиля во многом зависит от того, насколько стабильно держат управляемые колеса заданный курс движения автомобиля.
Если на управляемые колеса будет действовать какой-нибудь мгновенный боковой импульс (наезд колеса на местную микронеровность), то под действием этого импульса колеса повернутся на небольшой угол. После исчезновения импульса положение колес должно автоматически восстановиться.
Стабилизацией управляемых колес называется их свойство сохранять нейтральное положение, заданное им при прямолинейном движении и автоматически возвращаться в него.
Стабилизация управляемых колес достигается упругостью резины шин (упругая стабилизация) или путем наклона шкворней рулевой трапеции.
Упругая стабилизация
Упругий стабилизирующий момент шины создаётся при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки.

Во время увода колеса к передней части контакта с дорогой приближаются элементы шины, менее деформированные в поперечном направлении.
Из контакта с дорогой элементы шины выходят в более деформированном состоянии. Поэтому элементарный составляющие поперечной реакции Rу в передней части контакта меньше, чем в задней, и эпюра элементарных поперечных реакций имеет форму, близкую к треугольнику (рис. 1).
Боковая реакция Rу , являющаяся равнодействующей элементарных боковых реакций, прикладывается на расстоянии е от центра контактной площадки и создает упругий стабилизирующий момент шины:
Стабилизирующий момент шины достигает значительной величины у легковых автомобилей, которые имеют высокоэластичные шины и перемещаются с большой скоростью.
Упругий стабилизирующий момент шины резко уменьшается на скользких, обледенелых дорогах.
Стабилизация наклоном шкворней
Стабилизирующий момент Мст не всегда в результате упругости шин и не при всех условиях движения оказывается достаточным для обеспечения оптимальной стабилизации колес. Он значительно снижается на скользкой дороге и при действии на колесо продольных сил.

Дополнительно стабилизирующие моменты получают в результате наклонного расположения осей шкворней. Осью шкворня условно называют ось, относительно которой поворачивается поворотная цапфа управляемого колеса.
У большинства современных автомобилей каждый шкворень наклонен как в продольной, так и в поперечной плоскостях.

Если ось шкворня пп (рис. 2, а) наклонить в вертикальной плоскости поперек качения колеса на угол β , то при повороте колеса под действием случайного возмущающего импульса оно должно опуститься ниже плоскости дороги (на рисунке штрихпунктирной линией показан условный поворот колеса вокруг шкворня на угол 180˚), приподнимая автомобиль над поверхностью дороги.
При этом сила тяжести автомобиля, приходящаяся на переднюю ось на плече а образует стабилизирующий момент, называемый весовым . Плечо а и плечо обкатки – расстояние между точкой пересечения с дорогой центра беговой дорожки колеса и точкой пересечения с дорогой оси шкворня.
Для облегчения управления автомобилем (чаще всего переднеприводных) плечо обкатки делают отрицательным (рис. 2, б). При малых углах поворота стабилизирующее действие от поперечного наклона шкворня невелико, поэтому при движении автомобиля с высокими скоростями весовой стабилизирующий момент практически не возникает.
Поэтому чтобы добиться стабилизации управляемых колес в этих условиях шкворни наклоняют и в продольной плоскости колеса на угол γ (рис. 3).
Если возмущающий импульс вызовет увод колес автомобиля и он станет поворачиваться, то на автомобиль начинает действовать поперечная составляющая Ру центробежной силы, которая вызовет боковую реакцию дороги Rу в точке контакта колес с дорогой. Сила же Ру на шкворне, возникшая вследствие действия центробежной силы, будет приложена перпендикулярно плоскости качения колеса и совместно с реакцией Rу создаст пару сил с плечом с, которая будет стремиться вернуть колесо в нейтральное положение.
Так как на величину стабилизирующего момента оказывает влияние центробежная сила, которая зависит от квадрата скорости движения, то этот стабилизирующий момент также будет зависеть от скорости движения, поэтому он называется скоростным стабилизирующим моментом.
При очень эластичных шинах, создающих эффективную упругую стабилизацию колес, угол продольного наклона шкворня делают равным нулю, чтобы не усложнять управление автомобилем.
Развал и схождение управляемых колес
На управляемость автомобиля также оказывают влияние наклоны управляемых колес: развал колес и их схождение.
Шарнирное соединение управляемых колес с балкой моста или кузовом автомобиля подразумевает наличие зазоров в местах этих соединений. В результате при нагрузке автомобиля или по мере износа шкворневых соединений (шаровых опор и т. п.) плоскость качения колеса при движении автомобиля может оказаться наклоненной к плоскости дороги внутрь.
В этом случае колеса будут стремиться катиться по сходящимся траекториям, и будет иметь место качение колес с некоторым боковым проскальзыванием, что вызовет повышенный износ шин и расход топлива.
Чтобы привести управляемые колеса к «чистому» качению их устанавливают с предварительным развалом, т. е. так чтобы их плоскости качения были отклонены в сторону от колеи на угол от 0˚30‘ до 2,5˚.
Тогда при движении автомобиля плоскости качения колес будут почти перпендикулярны плоскости дороги, и боковое скольжение колес уменьшится до минимума. Кроме того, установка колес с развалом уменьшает плечо обката (размер b на рис. 4, а), что облегчает поворот колес.

Однако предварительный развал вызывает стремление колес катиться по расходящимся траекториям, что также приводит к изнашиванию шин. Этот недостаток компенсируется установкой колес со схождением, т. е. установкой их под некоторым углом к продольной оси автомобиля так, чтобы плоскости их качения пересекались впереди автомобиля. Можно сказать, что схождение является следствием установки колес с развалом.
Схождение колес определяется разностью расстояний А и Б (рис. 4, б) спереди и сзади моста на уровне его оси.
Развал и схождение взаимно компенсируют друг друга. Однако встречаются автомобили и с завалом колес. Величину развала или завала колес определяют экспериментально. Чаще всего колеса имеют развал и схождение. Главное, чтобы колесо работало без бокового скольжения, т. е. имело «чистое» (или близкое к этому) качение.
В таблице 1 приведены значения параметров установки управляемых колес некоторых отечественных автомобилей.
Таблица 1. Значения параметров установки развала и схождения различных автомобилей
Источник
Стабилизация управляемых колес
Стабилизация управляемых колес. Силы, действующие на автомобиль, стремятся отклонить управляемые колеса от положения, соответствующего прямолинейному движению. Чтобы не допустить поворота колес под действием случайных сил (толчков от наезда на неровности дороги и т. п.), управляемые колеса должны обладать способностью, сохранять положение, соответствующее прямолинейному движению, и возвращаться в него из любого другого положения. Эта способность называется стабилизацией управляемых колес.
Стабилизация обеспечивается наклонами шкворней в поперечной и продольной плоскостях и упругими свойствами пневматической шины.
Поперечный наклон шкворня вызывает подъем центра тяжести автомобиля при повороте управляемых колес. Поворачиваемое колесо, опираясь на дорогу, вызывает соответствующий подъем передней оси и центра тяжести автомобиля. Если отпустить рулевое колесо, то передняя часть автомобиля опустится вниз, и передние колеса возвращаются в положение, соответствующее прямолинейному движению. Стабилизирующий момент, действующий на управляемые колеса, с увеличением угла наклона шкворня и веса, приходящего на переднюю ось, возрастает. На стабилизирующий момент, возникающий вследствие поперечного наклона шкворня, не влияют скорость движения и качество дороги. Поперечный наклон шкворня (6—10°) уменьшает плечо поворота колеса, снижая передачу ударных нагрузок, действующих на рулевое управление от дороги. Часто стабилизирующий момент от наклона шкворня вбок называют весовым стабилизирующим моментом.
Продольный наклон шкворня обычно выбирают таким, при котором нижний конец шкворня смещен вперед относительно вертикали, проходящей через его середину. Вследствие этого точка пересечения оси с дорогой расположена впереди центра контактной площадки колеса и дороги. При движении автомобиля его траектория движения часто имеет криволинейный характер, предопределяющий возникновение центробежной силы. Эта сила стремится сдвинуть автомобиль от центра поворота, чему препятствуют реакции дороги, приложенные в центре контактных площадок и направленные к центру поворота. Реакции управляемых колес, действуя на плече, созданном в результате наклона шкворня назад, стремятся возвратить управляемые колеса в положение, соответствующее прямолинейному движению. Стабилизирующий момент, действующий на управляемые колеса, в результате наклона шкворней в продольной плоскости пропорционален квадрату скорости и называется скоростным стабилизирующим моментом. Угол наклона шкворня в продольной плоскости равен 1—3,5° и в значительной степени связан с упругим стабилизирующим моментом пневматической шины.
Эластичная шина соприкасается с дорогой на определенной площади, называемой контактной площадкой. Силы, действующие в контактной площадке, противодействуют повороту колеса. Создаваемый стабилизирующий момент зависит от эластичности шин. У грузовых автомобилей, снабженных сравнительно жесткими шинами, упругий стабилизирующий момент небольшой, у легковых автомобилей он больше и приводит иногда к чрезмерной стабилизации управляемых колес, затрудняя упраа1ение. Для уменьшения влияния упругого стабилизирующего момента у большинства легковых автомобилей угол наклона шкворня в продольной плоскости делают равным нулю.
Источник
Стабилизация управляемых колес
Где-то неделю назад я в статусе предлагал всем подумать над заданным вопросом:
И вот, пришла пора поразмышлять нам вместе. Прежде, чем получить ответ на обозначенный на картинке вопрос, придется, как обычно, изложить немного теории.
Итак, допустим, мы хотим ехать прямо, однако наше колесо под действием неких внешних воздействий (неровность дороги, боковой удар колесом, зазоры в рулевом приводе и т.д.) повернулось на какой-то угол. При этом автомобиль по инерции продолжает ехать прямо, а в пятне контакта возникает боковая сила, которая, с одной стороны, будет поворачивать наше транспортное средство в сторону повернутых колес, а с другой стороны – пытаться вернуть колесо в прямолинейное положение, параллельно вектору скорости:

(зависимость этой силы от угла увода колеса в принципе существует, но она непроста, на этом защищена не одна докторская)
Как же эта сила будет действовать на повернутое колесо?
В случае, если продолжение оси шкворня (оси, относительно которой вращается колесо), будет располагаться впереди центра колеса, эта сила будет создавать стабилизирующий момент:

В противном случае эта сила наоборот, будет стремиться дальше отклонить колесо от прямолинейного движения:

Таким образом, для стабилизации управляемых колес нам необходим первый случай. Реализовать его можно двумя путями.
1. Смещением оси шкворня вперед:

2. Или наклоном оси шкворня:

Ну и конечно, никто не исключает комбинацию этих двух путей, что и можно наблюдать на белом самокате:

Такая стабилизация называется скоростной – потому что на стоящем автомобиле она не проявляется, зато стабилизирующий момент растет с ростом скорости.
Источник



