
Частотное регулирование асинхронного двигателя
Частотное регулирование угловой скорости вращения электропривода с асинхронным двигателем в настоящее время широко применяется, так как позволяет в широком интервале плавно изменять обороты вращения ротора как выше, так и ниже номинальных значении.
Частотные преобразователи являются современными, высокотехнологичными устройствами, обладающими большим диапазоном регулирования, имеющими обширный набор функций для управления асинхронными двигателями. Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.

Частотные преобразователи по напряжению питания подразделяются на однофазные и трехфазные, а но конструктивному исполнению на электромашинные вращающиеся и статические. В электромашинных преобразователях переменная частота получается за счет использования обычных или специальных электрических машин. В статических частотных преобразователях изменение частоты питающего тока достигается за счет применения не имеющих движения электрических элементов.
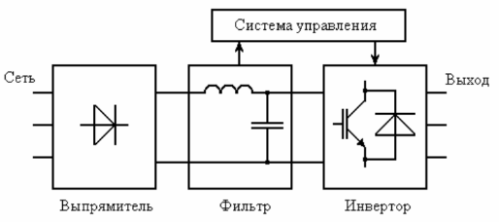
Схема частотного преобразователя асинхронного двигателя
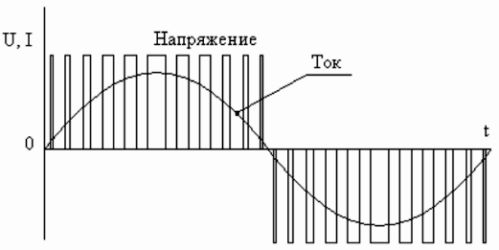
Выходной сигнал преобразователя частоты
Преобразователи частоты для однофазной сети позволяют обеспечить электропривод производственного оборудования мощностью до 7,5 кВт. Особенностью конструкции современных однофазных преобразователей является то, что на входе имеется одна фаза с напряжением 220В, а на выходе — три фазы с тем же значением напряжения, что позволяет подключать к устройству трехфазные электродвигатели без применения конденсаторов.
Преобразователи частоты с питанием от трехфазной сети 380В выпускаются в диапазоне мощностей от 0,75 до 630 кВт. В зависимости от величины мощности устройства изготавливаются в полимерных комбинированных и металлических корпусах.
Самой популярной стратегией управления асинхронными электродвигателями является векторное управление. В настоящее время большинство частотных преобразователей реализуют векторное управление или даже векторное бездатчиковое управление (этот тренд встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости).
Исходя из вида нагрузки на выходе, преобразователи частоты подразделяются по типу исполнения:
для насосного и вентиляторного привода;
для общепромышленного электропривода;
эксплуатируется в составе электродвигателей, работающих с перегрузкой.
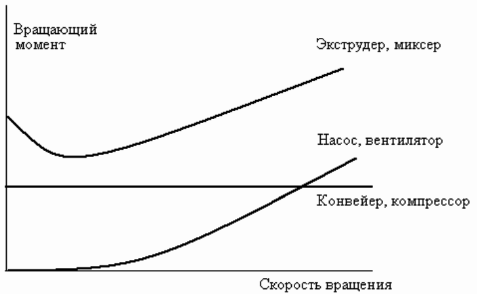
Механические характеристики типичных нагрузок
Современные преобразователи частоты обладают разнообразным набором функциональных особенностей, например, имеют ручное и автоматическое управление скоростью и направлением вращения двигателя, а также встроенный потенциометр на панели управления. Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Преобразователи способны выполнять автоматическое управление асинхронным двигателем по сигналам с периферийных датчиков и приводить в действие электропривод по заданному временному алгоритму. Поддерживать функции автоматического восстановления режима работы при кратковременном прерывании питания. Выполнять управление переходными процессами с удаленного пульта и осуществлять защиту электродвигателей от перегрузок.

Связь между угловой скоростью вращения и частотой питающего тока вытекает из уравнения
При неизменном напряжении источника питания U1 и изменении частоты изменяется магнитный поток асинхронного двигателя. При этом для лучшего использования магнитной системы при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери в стали.
Аналогично при увеличении частоты питания следует пропорционально увеличивать напряжение, чтобы сохранить магнитный поток постоянным, так как в противном случае (при постоянном моменте на валу) это приведет к нарастанию тока ротора, перегрузке его обмоток по току, снижению максимального момента.
Рациональный закон регулирования напряжения зависли от характера момента сопротивления.
При постоянном моменте статической нагрузки (Mс = const) напряжение должно регулироваться пропорционально его частоте U1/f1 = const. Для вентиляторного характера нагрузки соотношение принимает вид U1/f 2 1 = const.
При моменте нагрузки, обратно пропорциональном скорости U1/ √ f1 = const.
На рисунках ниже представлены упрощенная схема подключения и механические характеристики асинхронного двигателя при частотном регулировании угловой скорости.
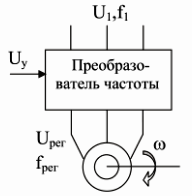
Схема подключения частотного преобразователя к асинхронному электродвигателю
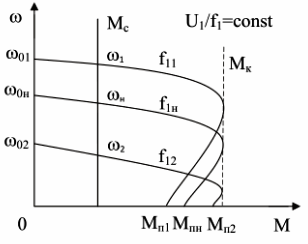
Характеристики для нагрузки с постоянным статическим моментом сопротивления
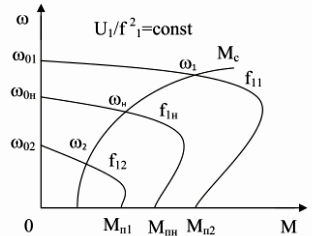
Х арактеристики для нагрузки вентиляторного характера
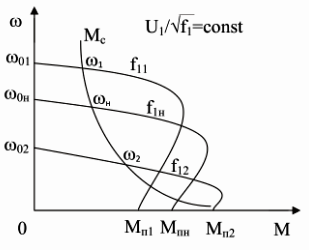
Характеристики при статическом моменте нагрузки обратно пропорциональном угловой скорости вращения
Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне — 20. 30 к 1. Регулирование скорости асинхронного двигателя вниз от основной осуществляется практически до нуля.
При изменении частоты питающей сети верхний предел частоты вращения асинхронного двигателя зависит от ее механических свойств, тем более что на частотах выше номинальной асинхронные двигатель работает с лучшими энергетическими показателями, чем на пониженных частотах. Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой но условиям механической прочности ротора.
При увеличении оборотов вращения двигателя выше указанного значения в ею паспорте частота источника питания не должна превышать номинальную не более чем 1,5 — 2 раза.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности мри гаком регулировании невелики, поскольку не сопровождаются увеличением скольжения. Получаемые при этом механические характеристики обладают высокой жесткостью.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Основные сведения о частотно-регулируемом электроприводе
Частотник в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток). Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных систем управления позволило различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты.
Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации. Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс . При постоянном моменте нагрузки Mс=const напряжение на статоре должно регулироваться пропорционально частоте:
Для вентиляторного характера момента нагрузки это состояние имеет вид:
При моменте нагрузки, обратно пропорциональном скорости:
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность частотного регулирования наглядно видна из рисунка 1
Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
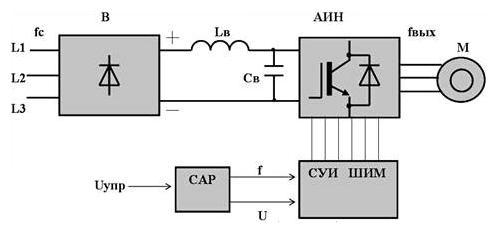
Принцип работы преобразователя частоты
Преобразователь частоты состоит из неуправляемого диодного силового выпрямителя В, автономного инвертора , системы управления ШИМ, системы автоматического регулирования, дросселя Lв и конденсатора фильтра Cв (рис.2). Регулирование выходной частоты fвых. и напряжения Uвых осуществляется в инверторе за счет высокочастотного широтно-импульсного управления.
Широтно-импульсное управление характеризуется периодом модуляции, внутри которого обмотка статора электродвигателя подключается поочередно к положительному и отрицательному полюсам выпрямителя.
Длительность этих состояний внутри периода ШИМ модулируется по синусоидальному закону. При высоких (обычно 2…15 кГц) тактовых частотах ШИМ, в обмотках электродвигателя, вследствие их фильтрующих свойств, текут синусоидальные токи.
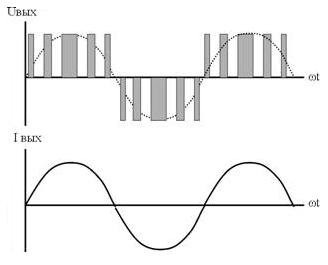
Таким образом, форма кривой выходного напряжения представляет собой высокочастотную двухполярную последовательность прямоугольных импульсов (рис. 3). Частота импульсов определяется частотой ШИМ, длительность (ширина) импульсов в течение периода выходной частоты АИН промодули-рована по синусоидальному закону. Форма кривой выходного тока (тока в обмотках асинхронного электродвигателя) практически синусоидальна.
Регулирование выходного напряжения инвертора можно осуществить двумя способами: амплитудным (АР) за счет изменения входного напряжения Uв и широтно-импульсным (ШИМ) за счет изменения программы переключения вентилей V1-V6 при Uв = const.
Второй способ получил распространение в современных преобразователях частоты благодаря развитию современной элементной базы (микропроцессоры, IBGT-транзисторы). При широтно-импульсной модуляции форма токов в обмотках статора асинхронного двигателя получается близкой к синусоидальной благодаря фильтрующим свойствам самих обмоток.
Такое управление позволяет получить высокий КПД преобразователя и эквивалентно аналоговому управлению с помощью частоты и амплитуды напряжения. Современные инверторы выполняются на основе полностью управляемых силовых полупроводниковых приборов – запираемых GTO – тиристоров, либо биполярных IGBT-транзисторов с изолированным затвором. На рис. 2.45 представлена 3-х фазная мостовая схема автономного инвертора на IGBT-транзисторах.
Она состоит из входного емкостного фильтра Cф и шести IGBT-транзисторов V1-V6 включенными встречно-параллельно диодами обратного тока D1-D6.
За счет поочередного переключения вентилей V1-V6 по алгоритму, заданному системой управления, постоянное входной напряжение Uв преобразуется в переменное прямоугольно-импульсное выходное напряжение. Через управляемые ключи V1-V6 протекает активная составляющая тока асинхронного электродвигателя, через диоды D1-D6 – реактивная составляющая тока.
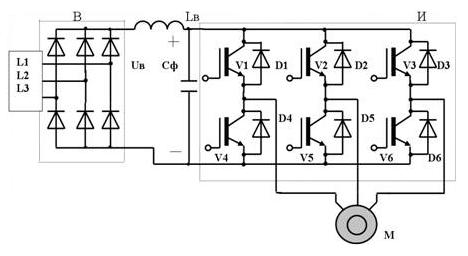
И – трехфазный мостовой инвертор;
В – трехфазный мостовой выпрямитель;
Сф – конденсатор фильтра;
Источник



