
10 класс
Механика
В истории науки первой законченной физической теорией стала классическая механика. Её основы были заложены в книге «Математические начала натуральной философии» (1687) выдающимся английским учёным Исааком Ньютоном (1643—1727).
В современном понимании механика — наука о механическом движении тел и происходящих при этом взаимодействиях между ними. Предметом её изучения являются движения любых материальных тел (кроме элементарных частиц), которые происходят со скоростями, значительно меньшими скорости света.
К основным физическим величинам, характеризующим механическое движение, относятся перемещение, скорость, ускорение. Установление связей между ними позволяет определить положение тела в пространстве в любой момент времени. При изучении механических явлений и процессов и при решении многих задач механики применяют такие модели, как материальная точка, абсолютно твёрдое тело, идеальная несжимаемая жидкость.
Механика тесно связана с другими разделами физики. Ряд её понятий и методов (при соответствующих обобщениях) находит применение в электродинамике, оптике, квантовой механике, теории относительности и др. Огромное значение механика имеет и для многих направлений астрономии. Так, знание основных понятий, уравнений и методов механики широко используется для расчёта орбит искусственных спутников и межпланетных аппаратов. Значительную роль механика играет в конструировании автомобилей и других технических объектов, в проектировании и создании речных и морских судов, различных сооружений, зданий и механизмов.
Целостное представление об основных понятиях, законах, моделях и приложениях механики вы получите при изучении кинематики, динамики, законов сохранения в механике, статики, гидро- и аэростатики.
Глава 2. Кинематика
Раздел механики, в котором изучаются способы описания движений и связь между физическими величинами, характеризующими эти движения, называют кинематикой (от греч. kinematos — движение). При этом не рассматриваются причины изменения характера движений, т. е. не учитываются массы тел и действующие на них силы.
Основная задача кинематики состоит в определении положения тела в пространстве в любой момент времени в выбранной системе отсчёта.
Однако любое тело состоит из частей, которые занимают различные положения в пространстве. На первый взгляд, задача описания движения тела кажется очень сложной. Наиболее простой способ — это научиться описывать движение точки.
За точку можно принять очень маленький предмет — маленький по сравнению с тем расстоянием, которое он проходит (например, пуля, выпущенная из ружья). Конечно, использовать модель точки можно только при условии, когда размерами и формой тела можно пренебречь в условиях решаемой задачи. Например, когда мы говорим о расстоянии, пройденном автомобилем, нет необходимости учитывать размеры или движение его колёс.
§ 3. Различные способы описания механического движения
Прямолинейное движение тела.
Из курса физики основной школы известно, что
механическое движение — это изменение положения тела в пространстве относительно других тел с течением времени.
В случае прямолинейного движения тело в любые моменты времени остаётся на одной прямой. Будем считать, что прямая на рисунке 2.1 изображает шоссе, а точка А — автомобиль, движущийся по нему. Выберем точку начала отсчёта расстояний. Обозначим её буквой О, а расстояние OA от начала отсчёта до движущейся точки — буквой r (см. рис. 2.1).
Для того чтобы определить положение автомобиля на шоссе, нужно указать его расстояние от точки, принимаемой за начало отсчёта. Эту точку можно выбирать произвольно. Знание только расстояния г не позволит однозначно определить положение автомобиля А в пространстве, так как это расстояние можно отсчитать от точки О как вправо, так и влево. Поэтому следует воспользоваться осью координат, т. е. выбрать на прямой положительное направление, отметив его стрелкой. Тогда положение тела можно охарактеризовать одной координатой — числом, принимающим как положительные, так и отрицательные значения.
Система отсчёта.
Особо отметим, что во всех случаях можно говорить лишь о движении одного тела относительно другого (например, о движении автомобиля относительно земли).
Тело, относительно которого рассматривается движение, называют телом отсчёта.
C телом отсчёта принято связывать систему координат. В случае прямолинейного движения достаточно использовать одну координатную ось. Кроме того, нам ещё потребуются часы, так как движение тела происходит во времени.
Тело отсчёта, связанная с ним система координат (или координатная ось) и часы образуют систему отсчёта.
Различные способы описания механического движения.
Движение тела считается заданным (известным), если известны уравнения (или графики, таблицы), позволяющие определить положение данного тела относительно системы отсчёта в любой момент времени.
Рассмотрим табличный способ описания прямолинейного движения тела на следующем примере. Будем определять положения автомобиля на прямолинейном участке шоссе через равные промежутки (интервалы) времени, например через каждую минуту. За начальный момент времени можно принять показания часов, когда мы определяем положение автомобиля в первый раз. Выбор начала отсчёта времени является произвольным. Если отсчёт времени производится с помощью секундомера, то целесообразно включить его в момент начала движения автомобиля (t0 = 0). Результаты измерений координаты автомобиля в соответствующие моменты времени приведены в таблице 1.
Таблица 1
| t, мин | х, м | t, мин | х, м |
| 0 | 0 | 7 | 2130 |
| 1 | 320 | 8 | 2250 |
| 2 | 1050 | 9 | 3130 |
| 3 | 1840 | 10 | 4130 |
| 4 | 2130 | 11 | 5130 |
| 5 | 2130 | 12 | 6130 |
| 6 | 2130 |
Перейдём к графическому способу описания движения. Графическое описание движения очень наглядно. Будем откладывать вдоль горизонтальной оси моменты времени, а вдоль вертикальной оси — соответствующие значения координат автомобиля. Соединив точки, каждая из которых соответствует координате автомобиля в определённый момент времени, получим график изменения координаты со временем (рис. 2.2).
График на этом рисунке содержит те же сведения о движении автомобиля, что и таблица 1. Приведённый график показывает, как меняется координата автомобиля с течением времени. Легко заметить, что получается довольно сложная кривая. Но это не означает, что автомобиль движется вдоль этой кривой, ведь его движение является прямолинейным.
Линию в пространстве, вдоль которой происходит движение тела в выбранной системе отсчёта, называют траекторией.
В рассмотренном случае траектория движения тела (автомобиля) — прямая линия. Если траектория представляет собой кривую линию, то такое движение называют криволинейным. На рисунке 2.3 приведены примеры траектории движения: а — прямолинейная; б — криволинейная.
Для тела, которое можно рассматривать как систему точек, расстояния между которыми не изменяются со временем, простейшими видами движения являются поступательное и вращательное.
Движение тела называют поступательным, если прямая, проведённая между двумя любыми его точками, остаётся параллельной самой себе.
Так, любые две точки (например, А и В) кабинки колеса обозрения (рис. 2.4, а) движутся так, что проходящая через них прямая AB всегда остаётся параллельной самой себе (рис. 2.4, б). Тем самым, кабинка движется поступательно.
Движение тела называют вращательным, если все его точки движутся по окружностям, центры которых лежат на одной прямой. Эту прямую называют осью вращения тела.
Вращательное движение совершают, например, колёса, валы двигателей и генераторов, пропеллеры самолётов.
Остановимся ещё на одном способе описания движения, называемом аналитическим. В каждый момент времени t координата х тела имеет определённое значение. C течением времени происходит изменение координаты. На математическом языке это означает, что координата х является функцией времени:
Вид этой функции в каждом конкретном случае будет вполне определённым.
Таким образом, существует три способа описания движения: табличный, графический и наиболее полный — аналитический, выражающий функциональную зависимость координаты от времени.
Вопросы:
1. Что изучает кинематика?
2. В чём заключается основная задача кинематики?
а) механическим движением;
б) телом отсчёта;
в) системой отсчёта?
4. В чём состоит:
в) аналитический способ описания движения?
Вопросы для обсуждения:
1. В безветренную погоду капли дождя падают вертикально. По какой траектории в этом случае будут стекать капли по стеклу автобуса, когда он находится на остановке? Изменится ли их траектория, если автобус будет двигаться?
2. Какие части велосипеда движутся поступательно при движении велосипедиста по горизонтальному участку дороги?
Это любопытно.
Из истории развития физики и техники
Попытки древних философов (прежде всего, Аристотеля) объяснить причины движения, в том числе механического, были плодом чистой фантазии. Подобно тому, рассуждали они, как утомлённый путник ускоряет шаги по мере приближения к дому, падающий камень начинает двигаться всё быстрее, приближаясь к матери-Земле.
Подлинное развитие науки о механическом движении началось с трудов Галилея.
Он открыл принцип относительности, ввёл понятие инерции, исследовал законы падения и движения тел по наклонной плоскости, предложил применять маятник для измерения времени. Галилей развил запрещённое в то время церковью учение Коперника о движении Земли вокруг Солнца, за что в 1633 г. был осуждён римским католическим судом. Приговор был отменён Ватиканом лишь в 1992 г. по инициативе папы римского Иоанна Павла II.
Галилей первым понял, что для исследования движения тел нужно научиться описывать их количественно (математически). При этом нельзя ограничиваться простым наблюдением за движущимися телами, нужно ставить заранее продуманные опыты и выражать их результаты на языке математики.
Источник
Аналитический способ описания механического движения тел
В кинематике существуют три способа аналитического описания движения материальной точки в пространстве. Рассмотрим их, ограничившись случаем движения материальной точки на плоскости, что позволит нам при выборе системы отсчёта задавать лишь две координатные оси.
1. Векторный способ.
В этом способе положение материальной точки `A` задаётся с помощью так называемого радиус-вектора `vecr`, который представляет собой вектор, проведённый из точки `O`, соответствующей началу отсчёта выбранной системы координат, в интересующую нас точку `A` (рис. 1). В процессе движения материальной точки её радиус-вектор может изменяться как по модулю, так и по направлению, являясь функцией времени `vecr=vecr(t)`.
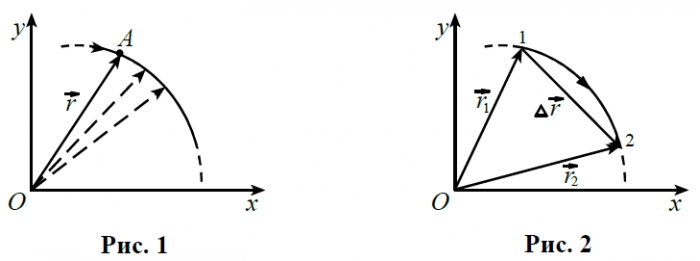
Геометрическое место концов радиус-вектора `vecr(t)` называют траекторией точки `A`.
В известном смысле траектория движения представляет собой след (явный или воображаемый), который «оставляет за собой» точка `A` после прохождения той или иной области пространства. Понятно, что геометрическая форма траектории зависит от выбора системы отсчёта, относительно которой ведётся наблюдение за движением точки.
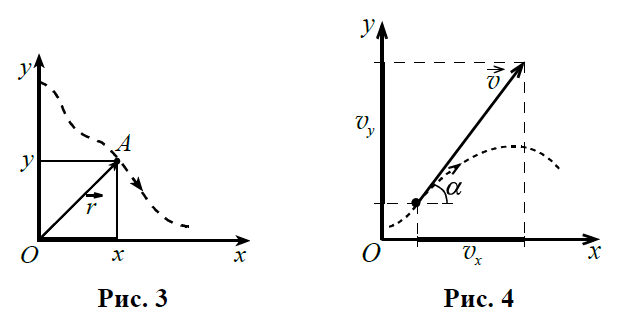
Пусть в процессе движения по некоторой траектории в выбранной системе отсчёта за промежуток времени `Delta t` тело (точка `A`) переместилось из начального положения `1` с радиус-вектором `vec r_1` в конечное положение `2` с радиус-вектором `vec r_2` (рис. 2). Приращение `Deltavec r` радиус-вектора тела в таком случае равно: `Deltavec r = vec r_2- vec r_1`.
Вектор `Deltavec r`, соединяющий начальное и конечное положения тела, называют перемещением тела.
Отношение `Delta vec r//Delta t` называют средней скоростью (средним вектором скорости) `vec v_»cp»` тела за время `Delta t`:
`vecv_»cp»=(Deltavecr)/(Delta t)` (1)
Вектор `vecv_»cp»` коллинеарен и сонаправлен с вектором `Deltavec r`, так как отличается от последнего лишь скалярным неотрицательным множителем `1//Delta t`.
Предложенное определение средней скорости справедливо для любых значений `Delta t`, кроме `Delta t=0`. Однако ничто не мешает брать промежуток времени `Delta t` сколь угодно малым, но отличным от нуля.
Для точного описания движения вводят понятие мгновенной скорости, то есть скорости в конкретный момент времени `t` или в конкретной точке траектории. С этой целью промежуток времени `Delta t` устремляют к нулю. Вместе с ним будет стремиться к нулю и перемещение `Delta vec r`. При этом отношение `Deltavec r//Delta t` стремится к определённому значению, не зависящему от `Delta t`.
Величина, к которой стремится отношение `Deltavec r//Delta t` при стремлении `Delta t` к нулю, называется мгновенной скоростью`vec v`:
`vec v =(Delta vec r)/(Delta t)` при `Delta t -> 0`.
Теперь заметим, что чем меньше `Delta t`, тем ближе направление `Deltavec r` к направлению касательной к траектории в данной точке. Следовательно, вектор мгновенной скорости направлен по касательной к траектории в данной точке в сторону движения тела.
В дальнейшем там, где это не повлечёт недоразумений, мы будем опускать прилагательное «мгновенная» и говорить просто о скорости `vec v` тела (материальной точки).
Движение тела принято характеризовать также ускорением, по которому судят об изменении скорости в процессе движения. Его определяют через отношение приращения вектора скорости `Delta vec v` тела к промежутку времени `Delta t`, в течение которого это приращение произошло.
Ускорением `veca` тела называется величина, к которой стремится отношение `Delta vec v//Delta t` при стремлении к нулю знаменателя `Delta t`:
`vec a =(Delta vec v)/(Delta t)` при `Delta t -> 0` (2)
При уменьшении `Delta t` ориентация вектора`Delta vec v` будет приближаться к определённому направлению, которое принимается за направление вектора ускорения `vec a`. Заметим, что ускорение направлено в сторону малого приращения скорости, а не в сторону самой скорости!
Напомним, что в системе СИ единицами длины, скорости и ускорения являются соответственно метр (м), метр в секунду (`»м»//»с»`) и метр на секунду в квадрате ( `»м»//»с»^2`).
2. Координатный способ.
В этом способе положение материальной точки `A` на плоскости в произвольный момент времени `t` определяется двумя координатами `x` и `y`, которые представляют собой проекции радиус-вектора $$ \overrightarrow
3. Естественный (или траекторный) способ.
Этот способ применяют тогда, когда траектория материальной точки известна заранее. На заданной траектории `LM` (рис. 5) выбирают начало отсчёта – неподвижную точку `O`, а положение движущейся материальной точки `A` определяют при помощи так называемой дуговой координаты `l`, которая представляет собой расстояние вдоль траектории от выбранного начала отсчёта `O` до точки `A`. При этом положительное направление отсчёта координаты `l` выбирают произвольно, по соображениям удобства, например так, как показано стрелкой на рис. 5.
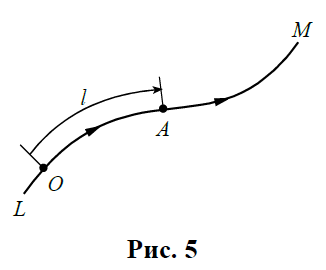
Движение тела определено, если известны его траектория, начало отсчёта `O`, положительное направление отсчёта дуговой координаты `l` и зависимость $$ l\left(t\right)$$.
Следующие два важных механических понятия – это пройденный путь и средняя путевая скорость.
По определению, путь `Delta S` — это длина участка траектории, пройденного телом за промежуток времени `Delta t`.
Ясно, что пройденный путь – величина скалярная и неотрицательная, а потому его нельзя сравнивать с перемещением `Delta vec r`, представляющим собой вектор. Сравнивать можно только путь `Delta S` и модуль перемещения `
|Delta vecr|`. Очевидно, что `Delta S >=|Deltavec r|`.
Средней путевой скоростью `v_»cp»` тела называют отношение пути `Delta S` к промежутку времени `Delta t`, в течение которого этот путь был пройден:
`v_»cp»=(Delta S)/(Delta t)` (3)
Определённая ранее средняя скорость `v_»cp»` (см. формулу (1)) и средняя путевая скорость отличаются друг от друга так же, как `Deltavec r` отличается от `Delta S`, но при этом важно понимать, что обе средние скорости имеют смысл только тогда, когда указан промежуток времени усреднения `Delta t`. Само слово «средняя» означает усреднение по времени.
Городской троллейбус утром вышел на маршрут, а через 8часов, проехав в общей сложности `72` км, возвратился в парк и занял своё обычное место на стоянке. Какова средняя скорость `vec v_»cp»` и средняя путевая скорость `v_»cp»` троллейбуса?
Поскольку начальное и конечное положения троллейбуса совпадают, то его перемещение `Delta vecr` равно нулю: `Deltavecr=0`, следовательно, `vecv_»ср»=Deltavecr//Deltat=0` и `|vecv_»ср»|=0`. Но средняя путевая скорость троллейбуса не равна нулю:
`v_»cp»=(Delta S)/(Delta t)=(72 «км»)/(8 «ч»)=9 «км»//»ч»`.
Источник



